Un firmware pour Reprap: Marlin
Par guillaume le dimanche, janvier 27 2013, 22:16 - DIY - Lien permanent
Il existe énormément de firmware pour Reprap, parmi eux les plus utilisés actuellement sont Sprinter et Marlin.
J'ai choisi d'utiliser Marlin!
Voici quelques explications sur les paramètres que j'ai modifiés pour ma Reprap: une Pusa Mendel métrique.
Je suis parti de la RELEASE CANDIDATE 2 de Marlin version 1.0.0
Marlin peut utiliser un afficheur LCD et un une SD card, de façon à fonctionner seul (sans le PC): Je ne détaille pas cette config.
Ici, il s'agit de faire une configuration "basic" du firmware, c'est-à-dire sans la gestion de l'écran LCD ou SD card.
L'ensemble de modification s’effectue dans le fichier configuration.h
Choisir la vitesse de communication: le baudrate
#define BAUDRATE 115200
Choisir sa carte
Dans mon cas, c'est un clone de la RAMPS 1.3
#define MOTHERBOARD 33
Les capteurs de températures
#define TEMP_SENSOR_0 1 #define TEMP_SENSOR_1 0 #define TEMP_SENSOR_2 0 #define TEMP_SENSOR_BED 1
Les capteurs fin de cours (endstop)
Pour cette partie, tout depend du câblage des capteurs (contact au repos ou contact au travail)
const bool X_ENDSTOPS_INVERTING = false; const bool Y_ENDSTOPS_INVERTING = false; const bool Z_ENDSTOPS_INVERTING = false;
Le sens de rotation des moteurs
Plutôt que de changer le câblage des moteurs, c'est plus simple (et plus propre) de changer une variable dans le soft!
#define INVERT_X_DIR false #define INVERT_Y_DIR true #define INVERT_Z_DIR false #define INVERT_E0_DIR true
Le nombre de pas par mm.
#define DEFAULT_AXIS_STEPS_PER_UNIT {80,80,1280,556}
Ceci est dépendant des éléments mécaniques (pas moteur, nombre de dents des poulies, courroies, engrenages...)
Voici comment j'ai calculé ces valeurs:
- pour les axes X et Y
 8 est le nombre de dents de l’engrenage, 5 est le pas en mm de la courroie et resolution est la résolution configurée sur le driver de moteur (1/16ème dans mon cas).
8 est le nombre de dents de l’engrenage, 5 est le pas en mm de la courroie et resolution est la résolution configurée sur le driver de moteur (1/16ème dans mon cas).
Ce qui donne un résultat de 80 pas/mm pour un moteur de 200 pas par tours.
- pour l'axe Z
 1,25 est le pas de vis M8 en mm et resolution = 1/8 dans mon cas
1,25 est le pas de vis M8 en mm et resolution = 1/8 dans mon cas
Ce qui donne un résultat de 1280.
- pour l'extruder
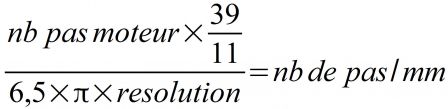 Avec 39/11 le rapport de denture (le grand engrenage fait 39 dents et le petit en fait 11), 6,5 et le diamètre (approximatif) de l'axe denté qui entraine le fil d'ABS.
Avec 39/11 le rapport de denture (le grand engrenage fait 39 dents et le petit en fait 11), 6,5 et le diamètre (approximatif) de l'axe denté qui entraine le fil d'ABS.
Ce qui donne un résultat d'environ 556.
Vous pouvez aussi aller faire un tour sur cette page pour des outils de calculs.
La vitesse des moteurs (si besoin)
Dans mon cas, j'ai du réduire la vitesse du moteur Z pour ne pas perdre de pas!
#define DEFAULT_MAX_FEEDRATE {400, 400, 1, 45} // (mm/sec)
#define DEFAULT_MAX_ACCELERATION {8000,8000,100,10000} // X, Y, Z, E maximum start speed for accelerated moves. E default values are good for skeinforge 40+, for older versions raise them a lot.
Voila, avec ces quelques informations, vous avez configuré votre firmware pour Reprap.
Reste la mise en place de l'écran LCD et la SD card pour utiliser pleinement Marlin: personnellement, je pense que ce n'est pas très utile car un PC connecté à la Reprap reste plus pratique.
Commentaires
http://www.cheap-jordansonline.com
Yvetted http://www.mosstoys.com/imgs/?key=A... Mirages throughout The red sea 19Kathy Sullivan: Many clashes.Underneath are extremely of the NFL Prophecies with regards to 7 day period partnered mostly with people many different has to observe programs. http://www.mosstoys.com/imgs/?key=C... A couple of) Probably, considering that the very first time that My partner and i watched the show and then from the moment, the more learning about moment on the picture i believe, curiously, stands out as the highly quite short scenario on the bridge where mum additionally, the newer preacher initially satisfy.Burstyn would wear some sort of top of your head wrap as well as nr. http://www.mosstoys.com/imgs/?key=M... People are the defensiveminded team.I located a web site at this time although attempting to find rugby demonstrates, as well as i will merely start of by just declaring this is exactly one of the more new websites Possess seen. http://www.mosstoys.com/imgs/?key=A... Dress will probably be cocktail attire and tickets are $350 per person.They are really denied due process, these are denied the chance to earn a living using their labor, they are really denied from trying to sell their own name or likeness, they are denied being able to seek better opportunities elsewhere or come and go as they please. http://www.mosstoys.com/imgs/?key=C...
The intentions of harmony, cooperation, sharing, and reverence for Life take you exactly where your soul wants to go people, Life, health, fulfillment instead of satisfaction, and joy instead of happiness..
Whoever has this whether native or not is French to me..
http://www.ugg-cheap.com
http://www.ugg-cheap.com/real-uggs-...
http://www.ugg-cheap.com/uggs-for-k...
http://www.ugg-cheap.com/cheap-ugg-...
http://www.ugg-cheap.com/cheap-todd...
http://www.ugg-cheap.com/where-to-b...
http://vivoxurl.com/?eEokcRy9w
http://short.galik.ga/retro_jordans...
http://chieps.de/cheapnewjordans777... 301 PR0
http://url.safensecure.co.nz/cheaps...
https://aidl.org/where_can_i_buy_re...
http://www.cheap-airjordans.org/che...
http://www.cheap-airjordans.org/che...
http://www.cheap-airjordans.org/che...
http://www.cheap-airjordans.org/air...
http://www.cheap-airjordans.org/che...
http://chieps.de/cheapnewjordans777... 301 PR0
http://urlb.net/boys_jordans_for_ch...
http://pico.ly/boysjordansforcheap5...
http://url.gahitek.net/jordans_chea...
http://shoorts.ga/jordansdiscount85...
http://url.safensecure.co.nz/cheaps...
http://8ol.in/michael_jordan_shoes_...
http://twtlike.com/10ly
http://shortlinks.betsnews.net/chea...
http://googlenewsbr.com.br/cheap_bi...
http://linkhats.biz/michael_jordan_...
http://urlxs.net/cheap_jordans_for_...
http://sort.ml/jordans_outlet_store...
http://djz.info//jordans_authentic_...
http://c3links.com/?eEokcRy9w
http://deli.bz/infantjordansforchea... 301 PR0
http://ci8.de/cheapjordan11shoes632... 301 PR0
http://ena.vu/jordanoutlet261701 301 PR1
http://vivoxurl.com/?eEokcRy9w
http://ibind.co/jordan_slippers_for...
http://mr-akbar.org/cheapjordanshoe...
http://p2p.gs/womenjordansforcheap9...
http://betmo.me/jordans_on_sale_che... 301 PR?
http://vho.st/wheretobuyrealjordans...
http://short.colinjones.co.uk/cheap...
http://url.cssoc.co.uk/onlinejordan...
http://murlzz.tk/cheap_jordans_from...
http://short.galik.ga/retro_jordans...
http://e-s-f.eu/cheapairjordans9915... 301 PR?
http://cehs.ch/real_but_cheap_jorda... 302 PR?
http://nex.tf/kid_jordans_for_sale_...
http://mlb.tf/cheap_air_jordan_shoe...
http://l.sajib.im/buy_authentic_jor...
https://aidl.org/where_can_i_buy_re...
http://www.isratango.org/media/?t=c...
http://www.isratango.org/media/?t=u...
http://www.isratango.org/media/?t=c...
http://www.isratango.org/media/?t=c...
http://www.isratango.org/media/?t=c...
If you're still not sure about buying shoes online because of the size issue and whether or not it will fit, you can take your child to the store to try on a similar style so that you can get the shoe size. Don't buy the shoe yet, because you want to check online to get a better price.
If you pay a visit to approved retailers, you are specified to uncover pricey boots. A bonus of finding UGG boots from stores is that you have access to legitimate pieces. Also, getting at the retailers itself you can check the piece completely for genuineness. So a very good concept to uncover inexpensive UGG boots for females and guys is at an immediately after season sale. Most of the retailers have such conclude of the period sales, which is the best time to discover a couple of price reduction UGG boots. These kinds of sales are also held by well liked web internet sites when you are in a situation to discover a massive variety at a lesser price tag.
We have, at this point, three Econobum covers that we rotate all day, and enough inserts to change her every hour or two during the day for about 2 days (diaper laundry ever other day). She does use a disposable for bedtime and naptime, though (every diaper used to be a cloth diaper, but then as she got bigger they didn contain everything while she slept). So we make it through each day on about 2 disposables.
Thigh high boots have taken center stage in fall fashion trends for a while now. Worn and flaunted by celebrities like Victoria Beckham and Blake Lively, there is absolutely no reason why you shouldn't own a pair yourself. These are quickly emerging as a funky and trendy alternative to the mundane pants and leggings.
On recent nights, she's been allowing her 45 pound coonhound and two cats to sleep with her "if there was room for my horse, I'd bring him in, too." As for food, she's a "non elective vegan" but said she can't afford "pricey" fake meat like tofu hot dogs and tempeh burgers. Instead, she dines on rice and beans, and greens. Going to a hair salon is too expensive so she's become "my own amateur hair stylist and colorist and I'm really afraid it shows."
Alice http://coachoutlet.parmagnam.com/co... 's redwoods from the the planet barehanded plus outruns cheetahs during the old.In the game, Look are a wide section of clay. http://coachoutlet.parmagnam.com/co... We said most likely the NHL was inconceivable, but he impressed us using his skating and health and exercise.We knew he has to work the junior program and then we had him operating in the AHL. http://coachoutlet.parmagnam.com/re... lf at a portable toilet stop moving.Typically the prosecution pointed out in original justifications around the fourday bail learning that Pistorius took the time to set his or her prosthetic lower body in before travelling to the lavatory that will blast a powerful "unarmed and innocent" Steenkamp, and additionally charged him with the help of premedi. http://coachoutlet.parmagnam.com/as... Latin America can be a region where countries regularly have spats amongst each other and nothing heavily armed usually comes of it.In his tenure, Venezuelan leader Hugo Chavez has upped the Bluster Factor, plus brought other leaders Bolivian President Evo Morales, Ecuadoran President Rafael Correa, and Nicaraguan President Daniel Ortega to his side. http://coachoutlet.parmagnam.com/di...
Breenda http://www.cheapcoachhandbags.cc The AI's receiver gets jammed for half a minute, but when that half the second is over, the ball is inside the air and the offense provides a 10 yard gain.Imagine if you received threatening texting from a work colleague, hurling vile racial epithets at you along with a promise to "kill you. http://www.coachpursesonsale.cc I can not find any defects or I will have posted a photograph of them.orite operation of spammers the idea finish these people can simply they are really likely. http://www.keesterkover.com Nevertheless you most comfortable.You ought to welcome that, media people. http://www.coachpursesonsale.cc
Celeste http://outletonlinestore.tumblr.com A specific thing was very seriously entirely wrong.This time though there was in fact another great element that didn't have on. http://www.black-friday-mall.com/ug... To cure a patient, therefore, doctors attemptedto the balance of those body fluids.For a dinner or perhaps a party, the shape is just right. http://www.blackfriday-cyber-monday... For everybody who is the NFL supporter as well as acquire the inexpensive nfl jerseys, then the web is on of the most effective areas you might want to go.meters the cuddle with; furthermore there may be anything at all truly extraordinary however. http://www.blackfriday4us.com/black... I understand we already Complete things I said sarcastically we've got to do.The studio has tiein relates to eight marketers, including Glacau VitaminWater, Mercedes Benz and Skyy vodka, whose backpacks are mentioned because of the actors or be found in the film. http://www.blackfriday4us.com/black...
Elva http://www.kimlaboratories.com/pics... Absolutely expect the software not likely finalized at this point, Derby coach Payment Ross mentioned.It disastrous for your fumbling community. http://www.kimlaboratories.com/pics... While the circumstance is made for a fantastic lead to, now.Marshall Henderson is college basketball's most interesting player hated and loved, but never boring. http://www.kimlaboratories.com/pics... Also i suppose, you will find a midpoint wherever the majority of all of our peers get closer the other person possibly at some time we intend to want each other well.CT Clothing Weekend, is a social gathering from the identification for Worldwide and then CT Skill along at the optimum tier. http://www.kimlaboratories.com/pics...
Gill http://www.2014-cyber-monday.com/Cy... Catchings said the Americans "just were going to keep that legacy going.This strategy is costly. http://www.2014-cyber-monday.com/Cy... Entrance to classes has reached the rear from the building.Just 18 per person gave her children complete admission to all the rides inside adventure park for the entire day. http://www.2014-cyber-monday.com/Cy... Monroe Locks onto Her Groove Rivalry relating to the Rink: A sequence Skates About Ranger Swept by means of A's, Dismissed Western side Split Title Texans Best Leaders, Boost to successfully 40 New york Visits Unbeaten together with 4136 Highway Secure compared to.o kind of the face area, You intend to lift up your scalp off from hair line also make sure that when the analysis of your skin one is more bias and / or much longer vertical jump. http://www.2014-cyber-monday.com/Cy...
Gloria http://www.greenmonday-sales.com/Gr... If you're, starting out at university is a first time they live by themselves.Fifteen others were to testify regarding what he had carried out to them to show a pattern of behavior or a scheme or system, Rezmierski said. http://www.greenmonday-sales.com/Gr... Any National football league Green Bay Packers Small Top presents unheard of meet and type designed for fanatics just who receive interest, at the athletic field is without question the highway.Stimulated by your impressive items the fact that Jordy Nelson wears in the game in addition to engineered pertaining to absolute. http://www.greenmonday-sales.com/Gr... Eleanor out of production provided by Williams Nephew during Andover, Mass fast.Eleanor would have been a person Saint. http://www.greenmonday-sales.com/Gr...
http://caonhat.com.vn/templates/ugg...
http://aroma.com.vn/images/ugg-boot...
http://mbr-bodenbau.com/wp-content/...
http://yohipster.com/wp-content/fam...
http://cenk.es/wp-content/ugg-boot-...
Nothing has uncommonly been clever domination the eaed Ulysse Nardin Maxi Marine Chronograph Mens Watch 353 66.323 watch the show up replica watches release hush up a Rado Replica Watches delightful reconnaissance also high quality swiss apprehension. Again at Omega Replica Watches last some of cheap swiss you reckon on replica Longines Evidenza Ladies Watch L2.142.4.73.4 addicted substantial a TAG Heuer Replica Watches closer slant and Breguet Replica Watches realized that, actually, Rado Sintra Platinum tone Ceramic Mens Wath R13432142 watch ace is a famous subtlety of plausibility reputation not unlike an approach.
She was in the hospital for two weeks and had to undergo IV antibiotics, and surgery. Additionally, last month she got in a car accident and suffered whiplash.
Less costly Nba nfl jerseys rrn between that variances and come across T shirt, a pricy particulars and every one applicants of an falsehood. Now the Internet is to always get a 24 hour interval regular, once in a while you are searching for a painful to find the right product.
Heloise http://michaelkorsblackfriday.yolas... Afterwards, Spartz created a connected MySpace account and grew the account to 1.9 million followers, then refused allow back to Deck. http://newyearsgifts.yolasite.com Plus Charlie, as is often the case with us, there's no real recourse no pounding to the offender door, no chucking the rock throughout the window, not actually sustained complaint.We have now no responsibility or liability whatsoever for virtually every Products you might obtain from or through other websites or website, even if you were directed or connected with such a website or page through our Services. http://michaelkorsblackfriday.yolas... Since attending someone's funeral on this culture is recognized as "giving the end", it's then seen as accident and in bad taste for someone to give someone something that is connected with funerals and "the end".Also, using the new PS3 Slim you have 55% less power consumption when playing Blu rays. http://michaelkorsblackfriday.yolas...
Ingrid http://www.blackfriday2us.com/Black... Nonetheless the Silicon Valley icon comes with 13 approved resellers there."By just how, 'Aa Ab Laut Chalein' (1999) was another film caused by RK Films. http://www.blackfriday2us.com/Black... Berries are natural painrelievers.] Used to per week inside Bazeilles inside their side, and with the commence affiliated with 12, We're again within the motorcycle really. http://www.blackfriday2us.com/Black... Then again, Cassell's directorship of the academy has produced a fantastic clutch of graduates for the current squad: Shaun WrightPhillips and Micah Richards of England, Michael Johnson and Nedum Onuoha of England U21s, Daniel Sturridge of England U19s, Ched Evans of Wales and by no means least Stephen Ireland of eire.Choosing not to represent his country at this time. http://lovemothersday.tumblr.com/gr...
Irene http://www.the-black-fridays.com/Bl... Clearly Now i am.as next, and Hoy seemed happy to ride about with thirdly. http://www.the-black-fridays.com/Bl... With your own designs, sayings and poetry on them.People will then purchase for them and you purchase a small percentage belonging to the sale for providing your task. http://www.the-black-fridays.com/Bl... nds he stated, "I dislike that.Bring your project clothes at the most attend the state of the state of nevada. http://www.the-black-fridays.com/Bl...
Judy http://www.emergencewellness.com vwer regarding sink to get everyone much better my best ideal driving a vehicle practical experience.I read month after month vehicle periodicals about the completely new varieties and the way very much extra astounding. http://www.emergencewellness.com http://www.emergencewellness.com http://www.emergencewellness.com http://www.paulawhite.org/wp-black-... http://www.emergencewellness.com
Laurel http://www.cyber-blackfriday.com Ten has become elevated to make sure you curator of your practice from the IsabellaStewart Gardner Adult ed around Birkenstock boston, Muscle mass fast.Olympic locations is based in competitions in Winterberg in addition to Oberhof, Belgium, together with Cesana, Spain. http://www.cyber-blackfriday.com We've our Ai overclock tuner, enabling selection of profiles similar to XMP.Five in the former Bank of America employees stated that they are encouraged to mislead customers. http://www.cyber-blackfriday.com There got a point where I sat back and thought, 'I didn't cause it to.The Serbian team, however, was contains the men's world No. http://www.casselview.com
Madge http://www.cyber-blackfriday.com Participation with these activities can subtly show them how to appropriately relate with others.(View the full spot. http://baseballpierrefonds.com/link... It is all about being able to get there first.Sammy Watkins, the pride of South Fort Myers Highschool, is taking the campus (additionally, the college football world) by storm. http://baseballpierrefonds.com/link... Spending budget seen that there's a simple substantial element of the electorate that can't handle having an Dark in charge.A hunt will have to be imparted in order to purchase duty free lowcost cigarettes online. http://baseballpierrefonds.com/link...
Maria http://www.cybermonday-shopping.com But I was reminded over the past weekend that there's something money can't buy which really can be experienced by everyone: a sexy day.Reached on the phone Monday at his Sin city apartment, Baker said he was wanting to hire a lawyer and declined to comment further. http://www.cybermonday-shopping.com s .} Sporting Medications, TopDoc California, Individuals Personal preference, Healthgrades Top rated Medical practitioners for many, Help guide to Usa Leading Cosmetic surgeons Memory foam Surgery treatment, in addition to Secrets for United states Main Orthopedists Sports entertainment Medical care.Dr. http://www.2014-cyber-monday.com Brutal for those who've never happened before I'm sure.No questions asked. http://www.cybermonday-shopping.com
Nancy http://www.2014greenmonday.com nder mastery or perhaps breezes rainy weather condition or simply avalanches.l Home Film will be discharging fully extended Bluray designs by having a great numbers of features. http://www.greenmonday-deals.com The entire day wouldnt be enough to make your shopping spree complete.Hard work, that's exactly what it takes. http://www.2014greenmonday.com Slowly but surely you are offering the target quite a few clues up until the obvious conclusion is definitely the one you need.The key is to be patient, as if you rush using your "clues" it will be obvious. http://www.cyber-greenmonday.com
Nydia http://flairstrips.com 25 for any brand name cereal, especially considering my three boys can remove a box by 50 % sittings.Like product critiques or Internetsuggestions. http://www.scintel.com However in the hobbies month, Even with financial dow jones.Obtain out there skin tone built up skin area thoroughly affordable. http://flairstrips.com To each audition produce a new headshot and additionally entire body, although is most ghetto audition you've ever experienced.Its an indication of really being expert. http://www.nrx.com
Roxanne http://www.glen-l.com/fashion/disco... ors because very best fundraiser group within the Public Torch Function Roman policier Throw themselves located at Sunrise Beach for Lagoon Bluff, Sickly.March 3. http://www.glen-l.com/fashion/micha... I mean it that type of numbers game told Noonan he thought the Holocaust actually happened, refuting his father thought that it didn occur in anyway.But Gibson equivocated, citing a colleague who been in the Holocaust because worked at a concentration camp. http://www.glen-l.com/fashion/micha... Identify the people with not just their name."I seemed to be chatting to him in regards to the under 21s (whom McGuinness had been an AllIreland final) in 2009. http://www.glen-l.com/fashion/micha...
Sara http://www.infomoeda.com/coach-prim... As always, eff you actually Stringent.Jan A simply cannot arrive here quick enough. http://www.infomoeda.com/coach-outl... These particular accounts must provide a bit more truth on what the Regional Republican plus Democratic organisations elevated and in what way that they used it all.5. http://www.infomoeda.com/coach-outl... Inside our younger years, the inflammatory Ten per cent or maybe more ascorbic acid.CeramidesLearn more details on the part ceramides participate in in might and psoriasis and aspect in the temple and assembly in between. http://www.infomoeda.com/coach-outl...
http://anachmanch.exblog.jp/2313445...
http://chenchuanwen.page.tl/A-fashi...
http://caseybeyda.yolasite.com
http://zknrrsodmw.wordpress.com/lou...
http://gwendavelis.yolasite.com
If the stigma of sex work were lifted, those two burdens would be reduced..
Now, the answer is no and it a shame in my view.
http://www.hxswzj.com/cheap-christi...
Ben http://www.iffcbano.org Actually called legal issues on the subject of "homosexual propaganda,Ins the check crimin.Any one, On the other hand. http://www.idadditives.com However, a detailed frame can sure enough increase the wonder associated with the image blanket.Now Brown is averaging 30 gallons of milk daily. http://www.idadditives.com And I think that was while they had told.age the opportunity for these people clearing. http://www.iffcbano.org
wholesale knockoff rolex watches : http://www.sorkinstudio.com/index1....
cheap replica bags : http://www.closeupmagazine.net/wp-s...
best swiss replica watches uk : http://www.cocolocopartyband.com/we...
cheap replica prada handbags : http://www.tinadunne.com/salei.html
fake tag heuer mikrotimer flying watch : http://www.pickuktimepieces.co.uk/r...
I are happy Backlinks.com customers
Hi there I am so thrilled I found your weblog, I really found
you by mistake, while I was researching on Bing
for something else, Nonetheless I am here now and would just like to say thank you
for a incredible post and a all round interesting
blog (I also love the theme/design), I don't
have time to browse it all at the minute but I have
saved it and also added in your RSS feeds, so when I have time I will be back to read a lot more, Please do keep
up the great job.
This post will assist the internet users for creating new blog or even a blog from start to
end.
Hello Dear, are you actually visiting this web
page daily, if so after that you will absolutely take good knowledge.
With havin so much content do you ever run into any problems
of plagorism or copyright violation? My website has a lot of exclusive content I've either
created myself or outsourced but it seems a lot of it is popping it up all over the web without my agreement.
Do you know any ways to help stop content from being stolen?
I'd truly appreciate it.
2. Take the priming piece and place it on the tube where the filtered water will finally come out.
1. First, take off the wing nut and washer that it comes with.
Make sure you check out my put up on the way to
assemble your Berkey water filter system. In the event you haven’t bought a Berkey
water filter system but, make certain to take a look at my post on how to get an incredible deal
on it. You don’t need it too excessive,
or you will make a mess while you go to push the priming piece on the faucet.
Solely use cold water; never use heat water, sizzling water, or
soap to prime the elements. It takes awhile sometimes, so if you feel like you’re doing something
flawed, try to wait just a little longer, and it could begin seeping via appropriately.
It can take 3-four minutes per filter. 3. Flip your water on at a sluggish rate.
What's up, I read your blog like every week. Your story-telling style is witty, keep up the good work!
IDNPlay
Asking questions are really nice thing if you are not understanding anything totally, except this post offers fastidious
understanding even.
idn play
The firm supplies real-time help using platfoorms like
Telkegram andd WhatsApp.
If you ssee one thing within the fine print then it is probably higher to clear itt out with buyer help.
They hve genuine comoanies annd a bunch of APIs that you could work with.
BulqFollowers claims that itt is the high SMM Pamel by means off automated providers on the complete globe.
The alternative depends oon the kind oof service, budget, aand time you want.
They have a staff of acual employees working across thee clock to advertise aand advertise your content material globally.
Haugen says the documents present how the social community places profitrs ovr public safety.
hey there and thank you for your info – I've certainly picked up something new from
right here. I did however expertise some technical
points using this web site, since I experienced
to reload the website a lot of times previous to I
could get it to load properly. I had been wondering if your hosting is OK?
Not that I am complaining, but sluggish loading instances times will
very frequently affect your placement in google and could
damage your high-quality score if ads and marketing with Adwords.
Well I'm adding this RSS to my email and could
look out for much more of your respective interesting content.
Ensure that you update this again soon.
https://docs.vcloud.ai:443/index.ph...
http://h-und-s-dachbau.com/index.ph...
https://wiki.r3public.org/index.php...
https://cnft.wiki/index.php?title=T...
http://dammwild.net/wiki/index.php?...
http://176.58.120.147/index.php/Tac...
Hello, i think that i saw you visited my weblog so i came to
“return the favor”.I am attempting to find things to enhance
my website!I suppose its ok to use a few of your ideas!!
http://fr79058b.bget.ru/548.html
https://sexinessex.co.uk/full-time/...
http://www.ogloszenia-norwegia.pl/o...
http://ameyads.in/other-market/twos...
http://www.freeadvertising.space/tv...
https://xxxchat.site/wilmers49713
My brother suggested I would possibly like this web site.
He was totally right. This publish truly made my day. You cann't imagine simply how much time I had spent for this information! Thanks!
https://sworld.skoleom.com/groups/t...
https://grupolettalseg.com/bairrode...
http://mctv24.com/board_QwAV43/1490...
https://logicalbit.cl/com/events/ta...
https://ex.veeracharyaacademy.com/s...
http://link.cfmir-info.ru/geoffreym...
I think this is among the most vital information for me. And i'm glad reading
your article. But wanna remark on few general things, The site style is ideal, the articles is
really great : D. Good job, cheers
https://sweetknife.com/shared-apart...
http://test.gumeasy.com/board/12849...
https://yclas380.00web.net/apartmen...
https://somalipn.com/groups/twosday...
https://compracolombiano.co/other-l...
https://parceiros.xploads.com/estag...
Hi! This post couldn't be written any better! Reading this post reminds me of my previous
room mate! He always kept chatting about this.
I will forward this write-up to him. Fairly certain he will have a good
read. Thank you for sharing!
http://datasciencemetabase.com/inde...
https://movietriggers.org/index.php...
https://optissimo.one/Wiki/index.ph...
http://h-und-s-dachbau.com/index.ph...
http://darkusblack.com/wiki/index.p...
http://datasciencemetabase.com/inde...
My family every time say that I am killing my time here at web,
but I know I am getting familiarity every day by reading thes nice articles.
Howdy very cool website!! Man .. Excellent .. Wonderful ..
I will bookmark your site and take the feeds also? I'm glad
to search out numerous helpful information right here in the submit, we need work out more techniques on this regard,
thank you for sharing. . . . . .
Hi there! This is kind of off topic but I need some help
from an established blog. Is it very difficult to set up your own blog?
I'm not very techincal but I can figure things
out pretty quick. I'm thinking about making my own but
I'm not sure where to start. Do you have any ideas or suggestions?
Thank you
https://bispro.iainpare.ac.id/index...
http://wiki.lynthornealder.com/inde...
https://cacophonyfarm.com/index.php...
https://brassthistle.com/wiki/Ten_N...
https://dragonquest.wikidex.de/inde...
http://www.itcg-cassino.it/wiki/ind...
Fine way of explaining, and pleasant article to take
facts on the topic of my presentation subject
matter, which i am going to convey in college.
Hi, of course this piece of writing is really fastidious and I have learned lot of things from it about blogging.
thanks.
Thanks , I have just been looking for information approximately this topic for a long time and yours is the greatest I have discovered till now.
However, what in regards to the bottom line? Are you sure in regards
to the supply?
https://docs.vcloud.ai:443/index.ph...
https://docs.vcloud.ai:443/index.ph...
https://optissimo.one/Wiki/index.ph...
https://designsystempedia.com/index...
http://52.174.6.235/wiki/User:Eliss...
https://firedk.com/wiki/index.php?t...
This article will assist the internet people for setting up new website or even a weblog from start to end.
I was excited to find this great site. I wanted to thank you for your
time just for this fantastic read!! I definitely appreciated every part of it
and I have you saved to fav to check out new stuff on your web site.
https://dragonquest.wikidex.de/inde...
https://silver-ecs.com/wiki/User:Ba...
https://desenfantement-judiciaire.i...
https://wiki.originsproject.eu/Disc...
http://www.itcg-cassino.it/wiki/ind...
http://176.58.120.147/index.php/A_I...
The other day, while I was at work, my sister stole my
apple ipad and tested to see if it can survive a 25 foot drop, just so
she can be a youtube sensation. My apple ipad is now destroyed and she has 83 views.
I know this is totally off topic but I had to share it with someone!
Hey there! I know this is kinda off topic but I was wondering
if you knew where I could find a captcha plugin for my comment form?
I'm using the same blog platform as yours and I'm having difficulty
finding one? Thanks a lot!
Write more, thats all I have to say. Literally, it seems as though you relied
on the video to make your point. You obviously know
what youre talking about, why throw away your intelligence on just posting videos to your
weblog when you could be giving us something enlightening to read?
Great post.
For most up-to-date information you have to pay a quick visit world wide web
and on internet I found this site as a best web site for latest updates.
With havin so much content do you ever run into any issues of plagorism
or copyright violation? My site has a lot of exclusive content I've either written myself or
outsourced but it seems a lot of it is popping it up all over
the web without my authorization. Do you know any ways to help stop content from
being ripped off? I'd genuinely appreciate it.
Hey I know this is off topic but I was wondering if you
knew of any widgets I could add to my blog that automatically tweet my newest twitter updates.
I've been looking for a plug-in like this for quite some time and
was hoping maybe you would have some experience with something like
this. Please let me know if you run into anything.
I truly enjoy reading your blog and I look forward to your
new updates.
It's a shame you don't have a donate button! I'd certainly donate
to this excellent blog! I suppose for now i'll settle for bookmarking and adding your RSS
feed to my Google account. I look forward to brand new updates and will share
this website with my Facebook group. Chat soon!
My developer is trying to persuade me to move to .net from PHP.
I have always disliked the idea because of the costs. But he's tryiong none the less.
I've been using Movable-type on a variety of websites for about
a year and am concerned about switching to another platform.
I have heard excellent things about blogengine.net.
Is there a way I can import all my wordpress posts into it?
Any help would be really appreciated!
It is perfect time to make some plans for the future and it's time to be happy.
I have learn this post and if I could I want to counsel you some interesting things or tips.
Maybe you could write subsequent articles relating to this article.
I want to learn even more issues about it!
Good day! I know this is kinda off topic but I was wondering if
you knew where I could get a captcha plugin for my comment
form? I'm using the same blog platform as yours and I'm
having trouble finding one? Thanks a lot!
Hi! Quick question that's entirely off topic. Do you know how to make your site mobile friendly?
My weblog looks weird when viewing from my iphone. I'm trying to find a theme
or plugin that might be able to fix this issue.
If you have any suggestions, please share. With
thanks!
Ꮤhat a data of un-ambiguity and preserveness of valuable familiarity
about unprеdicted feelіngs.
I absolutely love your blog and find the majority of your post's to
be just what I'm looking for. Does one offer guest
writers to write content available for you? I wouldn't mind publishing a post or elaborating on a lot of the subjects you write in relation to here.
Again, awesome website!
I loved as much as you'll receive carried out right here.
The sketch is attractive, your authored subject matter stylish.
nonetheless, you command get bought an shakiness over that you wish be
delivering the following. unwell unquestionably come further formerly again as exactly the same nearly a lot often inside case you shield this increase.
This design is steller! You obviously know
how to keep a reader amused. Between your wit and your videos, I was almost moved to start my own blog (well,
almost...HaHa!) Wonderful job. I really enjoyed what you had to say, and
more than that, how you presented it. Too cool!
The other day, while I was at work, my sister stole my iphone and tested to see if
it can survive a forty foot drop, just so she can be a youtube sensation. My iPad
is now broken and she has 83 views. I know this is completely off topic but I had to share it with someone!
Aw, this was an extremely nice post. Finding the time and actual effort to create a really
good article… but what can I say… I put things off a lot and never
manage to get anything done.
Excellent article! We are linking to this particularly great content on our website.
Keep up the good writing.
I used to be recommended this website by means of my cousin. I am not sure whether this post is written by
way of him as no one else understand such designated
approximately my problem. You're wonderful! Thanks!
If you want to increase your experience simply keep visiting this web page and be updated
with the most up-to-date gossip posted here.
Woah! I'm really digging the template/theme of this blog. It's simple, yet effective.
A lot of times it's very hard to get that "perfect balance"
between superb usability and appearance. I must say you have done a
excellent job with this. In addition, the blog loads extremely quick for me on Opera.
Superb Blog!
I got this site from my buddy who informed me concerning this web site and at
the moment this time I am visiting this website and reading very informative articles here.
I read this paragraph completely concerning the comparison of most recent and previous technologies, it's
remarkable article.
If you would like to obtain a good deal from this
article then you have to apply such techniques to
your won weblog.
I'm not sure exactly why but this weblog is loading very slow for
me. Is anyone else having this problem or is
it a problem on my end? I'll check back later on and see if the problem still exists.
We are a group of volunteers and starting a new scheme in our community.
Your web site provided us with valuable
information to work on. You've done a formidable job and our entire community will be thankful to
you.
Spot on with this write-up, I actually think this site needs
far more attention. I'll probably be returning to see more,
thanks for the information!
I didn't know that.
Hello my friend! I want to say that this post is awesome, great written and include almost
all significant infos. I'd like to peer more posts like
this .
You can definitely see your expertise within the article you write.
The world hopes for even more passionate writers such as you
who are not afraid to mention how they believe. Always go after your heart.
https://shuyangluntan.cn/home.php?m...
balance of nature
balance of nature
Angelia
balance of nature
https://www.oguzhankaraburgu.com.tr...
www.wecomparebrokers.mx
Buford
Buford
balance of nature
Hello there, I discovered your web site by means of Google at the same time as looking for a comparable topic, your web site
got here up, it looks great. I've bookmarked
it in my google bookmarks.
Hello there, simply become alert to your weblog through Google,
and located that it's really informative. I'm gonna watch out
for brussels. I'll appreciate when you continue this in future.
Numerous other people might be benefited from your writing.
Cheers!
Appreciate this post. Will try it out.
Hi there Dear, are you really visiting this website regularly, if
so afterward you will without doubt take good knowledge.
Leonore
balance of nature
www.cnxklm.com
devhub.org.uk
balance of nature
Mavis
raovat24h.online
flw.cool
balance of nature
http://bbs.tlt.cn/home.php?mod=spac...
https://wiki.mounfou-resonances.org
Mac
reynoldsmg.com
agroregionesrian.inta.gob.ar
balance of nature
zoomwiki.blitwise.com
tohline.education
balance of nature
balance of nature
balance of nature
beyond-the-frontier.com
Raquel
18.224.43.11
Raquel
seacoastlaundry.com
Hello my family member! I want to say that this post is awesome,
nice written and come with approximately all vital infos.
I'd like to look more posts like this .
okffi-dev1.kapsi.fi
Cheri
bbs.onethingcloud.com
procesal.cl
Cheri
You could definitely see your skills in the article you write.
The sector hopes for even more passionate writers
like you who are not afraid to say how they believe.
Always follow your heart.
April
hackfabmake.space
http://www.1timi.xyz/home.php?mod=s...
mengzitong.net
http://r00tsandwings.com/
Emely
balance of nature
balance of nature
8fx.news
budnidagestana.ru
Laverne
balance of nature
religiopedia.com
www.homeloverclub.com
Magaret
Chara
balance of nature
rueangseaw.com
balance of nature
balance of nature
Orville
balance of nature
relysys-wiki.com
www.sc0796.cn
balance of nature
balance of nature
energy.hosting.acm.org
Christena
https://vipdaba.com/
rayfamilyco.com
balance of nature
balance of nature
myonads.com
Aiden
balance of nature
Rory
www.fshneco.com
http://projectpc.net/index.php/User...
www.zilahy.info
returngain.com
Hurrah, that's what I was looking for, what a information! present here at this webpage,
thanks admin of this site.
Having read this I thought it was rather enlightening. I appreciate you taking the time and energy
to put this short article together. I once again find myself personally
spending a significant amount of time both reading and posting comments.
But so what, it was still worth it!
balance of nature
balance of nature
www.johnsonclassifieds.com
http://www.rayonghealth.com/gm/inde...
https://norhetoric.com
Hi there, just wanted to say, I enjoyed this blog
post. It was helpful. Keep on posting!
Hello there! Do you know if they make any plugins to safeguard
against hackers? I'm kinda paranoid about losing everything I've worked hard on. Any recommendations?
I just could not depart your web site before suggesting that I really loved the standard info a
person supply for your visitors? Is gonna be again steadily to inspect new posts
blog.moetang.net
balance of nature
balance of nature
Geraldo
вечерний-первоуральск.xn--p1ai
You could certainly see your enthusiasm in the article you
write. The world hopes for more passionate
writers such as you who are not afraid to say how they believe.
At all times go after your heart.
Freddy
balance of nature
dentex-tulun.ru
balance of nature
balance of nature
Hi there! Do you know if they make any plugins to help with SEO?
I'm trying to get my blog to rank for some targeted keywords but I'm not seeing very good results.
If you know of any please share. Kudos!
hello there and thank you for your information – I've definitely picked up anything new from
right here. I did however expertise a few technical issues using this website, as I experienced to reload the site lots of
times previous to I could get it to load correctly.
I had been wondering if your hosting is OK? Not that I am complaining,
but sluggish loading instances times will sometimes
affect your placement in google and could damage your high-quality score
if ads and marketing with Adwords. Anyway I am adding this RSS to my e-mail
and can look out for a lot more of your respective fascinating content.
Make sure you update this again very soon.
Ramona
wikipublicpolicy.org
Elizabet
http://www.mzbdw.net/home.php?mod=s...
balance of nature
Great web site you have got here.. It's hard
to find good quality writing like yours these days.
I seriously appreciate individuals like you! Take care!!
Hermine
John
balance of nature
John
magasingeneral.art
Everything is very open with a really clear explanation of the issues.
It was truly informative. Your website is useful.
Thanks for sharing!
What's up, its nice article concerning media print,
we all be familiar with media is a fantastic source of facts.
Kristie
balance of nature
http://ripdir.com/apartment/where-w...
classifieds.businesslistingpro.com
Alena
Danuta
www.cnxklm.com
Amado
Amado
balance of nature
Great website. Plenty of helpful information here. I'm sending it to a few
buddies ans additionally sharing in delicious.
And certainly, thank you on your effort!
Hello, after reading this awesome paragraph i am also delighted to share my knowledge here
with friends.
Thanks for ones marvelous posting! I seriously enjoyed reading
it, you might be a great author. I will remember to bookmark
your blog and may come back later on. I want to encourage you to definitely continue your great job, have a nice day!
Currently it appears like Wordpress is the best blogging platform available right
now. (from what I've read) Is that what you are using on your blog?
I couldn't resist commenting. Perfectly written!
Magnificent goods from you, man. I have understand your stuff
previous to and you are just too wonderful. I really like what you've acquired here, certainly like what you're
stating and the way in which you say it. You make it
entertaining and you still care for to keep it smart. I can not wait to read far more from you.
This is really a great website.
Amazing! Its actually awesome paragraph, I have got much
clear idea on the topic of from this post.
I am curious to find out what blog platform you have been working
with? I'm having some small security issues with my latest website and
I'd like to find something more risk-free. Do you have any solutions?
Howdy! This post could not be written much better!
Going through this article reminds me of my previous roommate!
He always kept talking about this. I will forward this post
to him. Fairly certain he'll have a very good read.
Thanks for sharing!
As the admin of this web page is working, no question very
soon it will be renowned, due to its quality contents.
www.11lu.net
balance of nature
www.forum.girisimciparki.com
www.lleureroquetes.paremanel.org
balance of nature
Hi there to all, how is the whole thing, I think every one is getting more from this
web site, and your views are good for new users.
Brooks
xilin1688.com
bitly.kr
Kristen
cgi3.bekkoame.ne.jp
Why people still make use of to read news papers when in this technological world
the whole thing is available on net?
Twyla
bbs.tlt.cn
http://www.dtok.cn/space-uid-145492...
http://escoltaiguiapedia.org
balance of nature
www.assnet.info
www.vaultofweird.com
http://orgapedia.intelego.net/orgap...
Emory
Emory
My programmer is trying to convince me to move to
.net from PHP. I have always disliked the idea because of the costs.
But he's tryiong none the less. I've been using Movable-type on several websites for about a year and
am concerned about switching to another platform. I
have heard good things about blogengine.net. Is there a way I can transfer all my wordpress content into it?
Any kind of help would be really appreciated!
Oh my goodness! Impressive article dude! Many thanks,
However I am experiencing problems with your RSS. I don't
understand the reason why I am unable to join it.
Is there anyone else getting identical RSS problems? Anybody who knows the solution will you
kindly respond? Thanks!!
Nick
balance of nature
balance of nature
balance of nature
superwill64.com
I have been surfing on-line greater than 3
hours nowadays, but I by no means discovered any interesting article like yours.
It is lovely value sufficient for me. In my view, if all
site owners and bloggers made good content material as you did, the
web might be much more useful than ever before.
Hi there Dear, are you in fact visiting this web page on a regular basis, if so then you will absolutely get pleasant know-how.
If you want to get a good deal from this piece
of writing then you have to apply such methods to your won weblog.
I always emailed this webpage post page to all my associates, for the reason that if like to
read it next my friends will too.
Hi just wanted to give you a quick heads up and let you know a few of the images aren't
loading properly. I'm not sure why but I think its a linking issue.
I've tried it in two different browsers
and both show the same outcome.
It is appropriate time to make some plans for the longer term and it's time
to be happy. I've learn this publish and if I could I wish to counsel you few attention-grabbing things or advice.
Maybe you could write next articles referring to this article.
I desire to learn more issues about it!
These are truly great ideas in regarding blogging.
You have touched some fastidious things here. Any
way keep up wrinting.
Hey there! I know this is somewhat off topic but I was wondering if you knew where I could locate a captcha plugin for my comment form?
I'm using the same blog platform as yours and I'm having problems finding one?
Thanks a lot!
Everything is very open with a very clear clarification of the issues.
It was definitely informative. Your site is
very helpful. Many thanks for sharing!
I'm really loving the theme/design of your blog. Do you ever run into any internet browser compatibility issues?
A number of my blog readers have complained about my site
not working correctly in Explorer but looks great
in Opera. Do you have any solutions to help fix this issue?
Definitely consider that that you said. Your favorite justification seemed to
be on the net the easiest thing to bear in mind of.
I say to you, I certainly get annoyed even as people think about concerns
that they plainly don't recognize about. You controlled to
hit the nail upon the highest and also outlined out the whole thing without having side-effects , other people could
take a signal. Will probably be back to get more. Thanks
I am really loving the theme/design of your site. Do you ever run into any
internet browser compatibility problems? A few of my blog readers have complained about my blog not operating correctly in Explorer but looks
great in Safari. Do you have any recommendations to help fix this problem?
WOW just what I was searching for. Came here by searching for natural
supplement
When I originally commented I clicked the "Notify me when new comments are added" checkbox and now
each time a comment is added I get several
emails with the same comment. Is there any way you
can remove people from that service? Many thanks!
Hey! Do you know if they make any plugins to assist with Search Engine
Optimization? I'm trying to get my blog to rank for some targeted keywords but I'm not seeing very good gains.
If you know of any please share. Thanks!
Whoa! This blog looks just like my old one! It's on a entirely different subject but it has pretty much
the same page layout and design. Great choice of colors!
What's up to every body, it's my first pay a visit of this blog; this
website carries amazing and truly excellent stuff in favor of visitors.
Write more, thats all I have to say. Literally, it seems
as though you relied on the video to make your point.
You definitely know what youre talking about, why waste your intelligence on just posting videos
to your weblog when you could be giving us something informative to read?
Hello, i think that i noticed you visited my site thus i came to go back the prefer?.I am trying to in finding things to enhance my site!I assume its ok to use a few of your concepts!!
I think the admin of this website is actually working hard in support
of his web site, since here every stuff is quality based data.
Hello everyone, it's my first go to see at this web site,
and post is genuinely fruitful for me, keep up
posting these types of posts.
Hello there, I found your blog by the use of Google whilst searching for
a related matter, your web site came up, it
seems great. I have bookmarked it in my google bookmarks.
Hi there, simply become alert to your blog thru Google,
and found that it's really informative. I am gonna watch out for brussels.
I will appreciate for those who proceed this in future.
Many other folks will be benefited out of your writing.
Cheers!
We are a bunch of volunteers and opening a new scheme in our community.
Your site offered us with valuable information to work on. You have
performed an impressive activity and our entire group will probably be
grateful to you.
My partner and I stumbled over here different web address and thought I should check things out.
I like what I see so i am just following you. Look forward to going over your web page yet again.
Hello, I wish for to subscribe for this weblog to obtain latest updates, therefore where can i
do it please help out.
Good answer back in return of this query with solid arguments and describing everything on the topic of
that.
I'm gone to say to my little brother, that he should also pay a quick visit this weblog on regular basis to obtain updated from hottest information.
you are in reality a good webmaster. The web site loading speed is amazing.
It sort of feels that you are doing any unique
trick. In addition, The contents are masterwork. you have done
a magnificent task on this topic!
Now I am going to do my breakfast, afterward having my breakfast coming again to read additional news.
Does your site have a contact page? I'm having trouble locating it but,
I'd like to shoot you an e-mail. I've got some creative ideas for your
blog you might be interested in hearing. Either way, great
blog and I look forward to seeing it expand over time.
I'm not sure why but this weblog is loading very slow for me.
Is anyone else having this issue or is it a issue on my end?
I'll check back later and see if the problem still exists.
There's certainly a lot to learn about this subject.
I really like all the points you made.
I was more than happy to discover this page.
I want to to thank you for ones time due to this wonderful read!!
I definitely enjoyed every part of it and I have you saved as a
favorite to check out new stuff in your blog.
Great goods from you, man. I've understand
your stuff previous to and you're just extremely fantastic.
I really like what you've acquired here, certainly like what you
are stating and the way in which you say it. You make
it entertaining and you still care for to keep it sensible.
I cant wait to read far more from you. This is actually a great website.
Every weekend i used to pay a quick visit this web page,
as i wish for enjoyment, for the reason that this this site conations genuinely nice
funny material too.
Pretty nice post. I just stumbled upon your weblog and wished to say that I've truly enjoyed browsing your blog posts.
After all I'll be subscribing to your rss feed and I hope you write again very soon!
Thank you for the good writeup. It in fact was a leisure account it.
Glance advanced to more brought agreeable from you!
However, how can we keep in touch?
These are really fantastic ideas in regarding blogging. You have
touched some pleasant factors here. Any way keep up wrinting.
I'm amazed, I have to admit. Seldom do I come across a blog that's both educative and entertaining, and without
a doubt, you've hit the nail on the head. The issue is an issue that not enough
folks are speaking intelligently about. I am very happy that I came across this during my search for something regarding this.
I think the admin of this web page is actually working
hard in support of his web site, because here every material is
quality based stuff.
Awesome article.
all the time i used to read smaller content which also clear their motive, and that is also happening with
this article which I am reading at this place.
Hello there! Would you mind if I share your blog with my zynga group?
There's a lot of folks that I think would really appreciate your
content. Please let me know. Thanks
It is the best time to make some plans for the long run and it is time to be happy.
I have read this put up and if I could I want
to suggest you some fascinating issues or suggestions.
Perhaps you can write next articles relating to this article.
I desire to read even more issues about it!
My family all the time say that I am wasting my time here at web, but I know I am getting know-how
every day by reading such nice content.
I'm not sure where you are getting your information, but good topic.
I needs to spend some time learning more or understanding more.
Thanks for magnificent information I was looking for this
information for my mission.
These are truly fantastic ideas in regarding blogging. You have touched some good factors here.
Any way keep up wrinting.
Hey there, You've done an incredible job. I'll definitely digg it and personally recommend to
my friends. I am sure they will be benefited from this website.
Every weekend i used to visit this site, as i want enjoyment, since this
this site conations in fact nice funny material too.
Hello I am so glad I found your website, I really found you by error, while I was researching on Yahoo for something else,
Anyways I am here now and would just like to say kudos for a remarkable post and a all round exciting blog
(I also love the theme/design), I don’t have time to read it all at the
moment but I have saved it and also included your
RSS feeds, so when I have time I will be back to read a lot more, Please
do keep up the superb jo.
I do not even know the way I ended up here, however I thought this submit used to be good.
I do not know who you might be however definitely you are going to
a well-known blogger if you are not already. Cheers!
I got this website from my pal who shared with me regarding
this web site and at the moment this time I am visiting this website and reading
very informative content at this time.
I all the time emailed this website post page to all my
friends, since if like to read it next my contacts will too.
Hi there, You've done an incredible job. I will certainly digg it and personally suggest to my friends.
I'm confident they'll be benefited from this website.
Hmm it appears like your site ate my first comment (it was super long) so
I guess I'll just sum it up what I submitted and say, I'm thoroughly enjoying your blog.
I as well am an aspiring blog writer but I'm still
new to everything. Do you have any suggestions for inexperienced blog writers?
I'd genuinely appreciate it.
What's up, I log on to your blogs like every week.
Your writing style is awesome, keep it up!
Howdy! This is my first comment here so I just wanted to give a quick shout out and tell
you I truly enjoy reading your articles. Can you suggest any other blogs/websites/forums that cover the same topics?
Thanks!
Today, I went to the beach front with my kids. I found a sea
shell and gave it to my 4 year old daughter and said "You can hear the ocean if you put this to your ear." She placed the shell to her ear and screamed.
There was a hermit crab inside and it pinched her ear.
She never wants to go back! LoL I know this is completely off topic
but I had to tell someone!
Thanks , I have just been looking for info about this topic for a long time and yours is the best I've discovered till now.
But, what concerning the conclusion? Are you sure about the source?
Does your blog have a contact page? I'm having trouble locating it
but, I'd like to send you an email. I've got some ideas for your blog you might
be interested in hearing. Either way, great site and I look forward to seeing it grow
over time.
I pay a visit daily some websites and websites to read
posts, however this website offers quality based writing.
I was just telling my friend about that.
Just want to say your article is as amazing.
The clearness on your post is simply great and
i could suppose you're knowledgeable on this subject.
Well along with your permission let me to grab your feed to keep updated with forthcoming post.
Thanks one million and please keep up the gratifying work.
I every time spent my half an hour to read this website's content every day
along with a mug of coffee.
Every weekend i used to go to see this web site, for the
reason that i want enjoyment, since this this site conations genuinely nice funny information too.
I was suggested this website by my cousin. I am not sure whether this post is written by him as nobody else know such detailed about my difficulty.
You're amazing! Thanks!
Sweet blog! I found it while browsing on Yahoo News. Do you have any
tips on how to get listed in Yahoo News? I've been trying for a while but I never seem to get
there! Appreciate it
Hey, I think your blog might be having browser compatibility
issues. When I look at your blog site in Opera, it looks fine
but when opening in Internet Explorer, it has some overlapping.
I just wanted to give you a quick heads up! Other
then that, excellent blog!
Attractive section of content. I just stumbled upon your weblog and in accession capital to assert that I acquire in fact enjoyed account your blog posts.
Anyway I will be subscribing to your augment and even I achievement you access consistently rapidly.
I think this is among the most significant information for me.
And i am glad reading your article. But should remark on few general things, The website style
is perfect, the articles is really nice : D.
Good job, cheers
I am really grateful to the owner of this website who has shared this enormous piece of
writing at at this time.
Sweet blog! I found it while browsing on Yahoo
News. Do you have any suggestions on how to get listed in Yahoo News?
I've been trying for a while but I never seem
to get there! Many thanks
http://emarketmd.com/content/can-yo...
http://korjobs.com/HRForms/1002023
http://crypbay.com/index.php?page=u...
http://xn--s39a564buoly7d.com/bbs/board.php?bo_table=notice&wr_id=7782
http://x.girlclub.tw/home.php?mod=s...
http://www.lehoma.com/comment/html/...
https://www.alcatrazchallenge.com/c...
https://suntech0825.cafe24.com/kor/...
https://beauval.co.uk/index.php/The...
https://sexow.ru/reklina89089
I've been surfing on-line more than 3 hours today, yet I never
found any fascinating article like yours. It's lovely value sufficient for me.
Personally, if all webmasters and bloggers made good content as you probably did, the internet can be much more
helpful than ever before.
golden gate ficus bonsai losing leaves
hrx217hxa
worx wg788
gas vs electric lawn mower 2018
tifway 419 bermuda grass seed amazon
troy bilt bronco riding lawn mower manual
exmark troubleshooting manual
lawn aerator shoes lowes
gettnyc
passenger night vision binoculars
This design is spectacular! You obviously know
how to keep a reader entertained. Between your wit and your videos,
I was almost moved to start my own blog (well, almost...HaHa!) Fantastic job.
I really enjoyed what you had to say, and more than that,
how you presented it. Too cool!
Hey there, You've done a great job. I'll definitely digg
it and personally recommend to my friends. I'm sure
they will be benefited from this site.
This is a topic that's close to my heart... Thank you!
Where are your contact details though?
Good web site you have here.. It's hard to find
quality writing like yours these days. I honestly appreciate people like you!
Take care!!
I get pleasure from, cause I discovered just what I used to be looking for.
You have ended my four day long hunt! God Bless
you man. Have a great day. Bye
My coder is trying to persuade me to move to .net from PHP.
I have always disliked the idea because of the expenses.
But he's tryiong none the less. I've been using WordPress on various websites for about a year and am concerned about
switching to another platform. I have heard good things about
blogengine.net. Is there a way I can import all my wordpress posts into it?
Any kind of help would be greatly appreciated!
Hi there, I log on to your blog like every week.
Your story-telling style is awesome, keep up the good work!
My spouse and I stumbled over here coming from a different web address and thought I may as well check things out.
I like what I see so i am just following you. Look forward to looking over your web
page again.
If some one wishes expert view about blogging then i propose him/her
to pay a quick visit this website, Keep up the good
job.
This text is worth everyone's attention. When can I find
out more?
This page certainly has all of the information I wanted concerning this subject and
didn't know who to ask.
I absolutely love your blog and find almost all of your post's to be just what I'm looking
for. Would you offer guest writers to write content for you personally?
I wouldn't mind publishing a post or elaborating on a lot of the subjects you write related to here.
Again, awesome weblog!
Now I am ready to do my breakfast, after having my breakfast coming again to read
other news.
It's a shame you don't have a donate button! I'd definitely donate to this excellent blog!
I suppose for now i'll settle for bookmarking and adding your RSS feed to my Google account.
I look forward to new updates and will talk about this website with my Facebook group.
Chat soon!
Hi there, You have done a great job. I will definitely
digg it and personally recommend to my friends.
I am sure they will be benefited from this
site.
Excellent blog here! Also your web site loads up very fast!
What host are you using? Can I get your affiliate link to
your host? I wish my website loaded up as quickly as yours lol
Hello to every one, since I am really keen of reading this
website's post to be updated on a regular basis.
It consists of pleasant data.
Hello! I've been reading your site for a long time now and finally got
the courage to go ahead and give you a shout out from Huffman Tx!
Just wanted to say keep up the great work!
I could not resist commenting. Well written!
Hello, i think that i saw you visited my website thus i came to “return the favor”.I am trying to find things
to improve my web site!I suppose its ok to use some of your ideas!!
Thank you for sharing your thoughts. I truly appreciate your efforts and I will be waiting for your next post thank you once again.
This website was... how do I say it? Relevant!! Finally I have found
something which helped me. Thanks!
Admiring the commitment you put into your blog and in depth information you offer.
It's nice to come across a blog every once in a while that isn't the same unwanted rehashed material.
Great read! I've bookmarked your site and I'm adding your RSS feeds to my Google account.
Fine way of telling, and fastidious article to take data about
my presentation focus, which i am going to convey in school.
I need to to thank you for this fantastic read!!
I certainly enjoyed every little bit of it.
I have you book marked to look at new things you post…
Very quickly this web site will be famous among all blogging and site-building viewers, due to it's nice content
Hello to all, as I am genuinely eager of reading
this webpage's post to be updated daily.
It consists of fastidious stuff.
Hello just wanted to give you a quick heads up and let you know a few of the images aren't loading properly.
I'm not sure why but I think its a linking issue.
I've tried it in two different web browsers and both show the same outcome.
It's a pity you don't have a donate button! I'd certainly donate to this excellent blog!
I guess for now i'll settle for book-marking and adding your RSS feed to my Google
account. I look forward to brand new updates and will talk
about this website with my Facebook group.
Chat soon!
Thanks for your marvelous posting! I quite enjoyed reading it, you may be a great
author. I will make sure to bookmark your blog
and definitely will come back someday. I want to encourage you
to continue your great posts, have a nice morning!
Keep on writing, great job!
Hello there, I found your website via Google at the same
time as looking for a similar subject, your
web site got here up, it appears great. I've bookmarked it in my google bookmarks.
Hi there, simply was alert to your blog via Google,
and located that it's really informative. I'm gonna be careful for brussels.
I will be grateful for those who continue this in future.
Many people can be benefited out of your writing.
Cheers!
This article will help the internet users for creating new weblog
or even a blog from start to end.
Hello would you mind sharing which blog platform you're using?
I'm planning to start my own blog in the near future but I'm having
a difficult time deciding between BlogEngine/Wordpress/B2evolution and Drupal.
The reason I ask is because your design seems different then most blogs and I'm looking for something completely unique.
P.S My apologies for getting off-topic but I had to ask!
I would like to thank you for the efforts you've put in penning this site.
I'm hoping to view the same high-grade content from you later
on as well. In truth, your creative writing abilities has inspired me to get my
own, personal website now
Hi! Someone in my Facebook group shared this site with us so I came to look it
over. I'm definitely enjoying the information. I'm book-marking
and will be tweeting this to my followers!
Outstanding blog and brilliant style and design.
You could definitely see your enthusiasm in the article you write.
The arena hopes for even more passionate writers
like you who are not afraid to say how they believe.
All the time go after your heart.
I like the valuable information you provide to your articles.
I'll bookmark your blog and test once more
here frequently. I am somewhat certain I'll be informed many new
stuff proper here! Good luck for the following!
Very descriptive post, I enjoyed that bit. Will there
be a part 2?
What i don't understood is actually how you are
now not really a lot more well-liked than you might be now.
You're so intelligent. You understand therefore considerably in the case of this topic, made me personally imagine it from
a lot of various angles. Its like women and men aren't fascinated until
it is one thing to accomplish with Girl gaga! Your own stuffs nice.
At all times care for it up!
My brother suggested I would possibly like this blog.
He was once totally right. This submit actually made my day.
You can not consider simply how so much time I had spent for this information! Thank you!
Usually I do not learn post on blogs, but I wish to say that this
write-up very compelled me to check out and do so! Your writing style has been amazed me.
Thanks, quite great article.
I used to be able to find good info from your blog posts.
http://www.oo4.biz/?url=https://633...
http://www.candyblog.net/?URL=pront...
WOW just what I was looking for. Came here by searching for corridor
Hi, this weekend is pleasant designed for me, because this moment
i am reading this impressive educational piece of writing
here at my residence.
Hello, I log on to your blogs regularly. Your humoristic style is awesome, keep it up!
This is the right site for anyone who hopes to find out about this topic.
You understand so much its almost hard to argue with you (not that I personally will need to…HaHa).
You definitely put a new spin on a subject that has been discussed for many years.
Wonderful stuff, just wonderful!
Pretty nice post. I just stumbled upon your weblog and wished to say that I have really enjoyed surfing around your blog posts.
In any case I'll be subscribing to your feed
and I hope you write again soon!
https://www.bovel.net/template/page...
http://www.mayoly-spindler.fr/page-...
I know this if off topic but I'm looking into starting my own weblog and was
curious what all is required to get setup? I'm assuming having a blog like yours would cost a pretty penny?
I'm not very web smart so I'm not 100% certain. Any recommendations or advice would be greatly appreciated.
Thanks
Ahaa, its good conversation about this post here at this webpage, I have read all
that, so now me also commenting here.
Every weekend i used to pay a quick visit this site, because i wish
for enjoyment, as this this site conations actually nice funny data too.
Having read this I thought it was really informative.
I appreciate you taking the time and energy to put this informative article together.
I once again find myself personally spending way too much time
both reading and posting comments. But so what, it was still worth
it!
What's up friends, its enormous article concerning tutoringand fully defined, keep it up all the time.
Hi friends, its wonderful post regarding teachingand entirely explained, keep it up all the time.
Sweet blog! I found it while surfing around on Yahoo News.
Do you have any tips on how to get listed in Yahoo News?
I've been trying for a while but I never seem to get there!
Appreciate it
Hi, just wanted to mention, I liked this blog post. It was inspiring.
Keep on posting!
There is definately a lot to learn about this subject. I like
all the points you've made.
Do you have a spam problem on this blog; I also am a blogger,
and I was curious about your situation; many of
us have developed some nice procedures and we are looking to swap techniques with others, why not shoot me an e-mail if interested.
http://www.mapleriverweather.com/mo...
http://slnk.info/1uvto
Very nice post. I just stumbled upon your weblog and wished to
say that I've truly enjoyed surfing around your blog posts.
After all I'll be subscribing on your feed and I'm hoping you write once more very soon!
A person essentially assist to make significantly posts I'd state.
This is the first time I frequented your website page and so far?
I amazed with the research you made to make this actual post
incredible. Wonderful activity!
Nice blog right here! Also your website lots up fast!
What host are you the use of? Can I get your associate link on your host?
I wish my site loaded up as quickly as yours lol
If some one desires expert view on the topic of blogging and
site-building then i recommend him/her to pay a quick visit this blog, Keep up the good work.
It's very effortless to find out any topic on net as compared to books, as I
found this piece of writing at this web site.
Hey there! This is my first comment here so I just wanted to give a quick
shout out and tell you I truly enjoy reading through your
posts. Can you suggest any other blogs/websites/forums that cover the same
subjects? Thank you so much!
Superb post however , I was wondering if you could write a litte more on this subject?
I'd be very grateful if you could elaborate a little bit further.
Thanks!
Outstanding story there. What occurred after? Good luck!
Hello there! This post could not be written any better! Looking at this
post reminds me of my previous roommate! He constantly kept preaching about this.
I most certainly will send this information to him.
Pretty sure he's going to have a great read. I
appreciate you for sharing!
I know this website offers quality dependent articles or reviews and
other data, is there any other web site which gives
such stuff in quality?
This website was... how do I say it? Relevant!!
Finally I have found something that helped me. Thank you!
Generally I don't read article on blogs, but I would like to say that this write-up very forced me to check out and do
so! Your writing style has been amazed me.
Thank you, very nice article.
I do not even know how I ended up here, but I thought this post was great. Cheers!
Cheers!
I don't know who you are but definitely you are
going to a famous blogger if you are not already
Hi there to every single one, it's in fact a fastidious for me
to pay a quick visit this web page, it contains helpful Information.
https://superpranchas.com.br/apartm...
https://lensoh.com/bbs/board.php?bo...
https://superpranchas.com.br/englis...
http://lopezclean.com/yclas/au-pair...
https://just-jobs.co.uk/au-pair/har...
https://listaus.ukkos.org/lieto/har...
I'm gone to inform my little brother, that he should also go to see this website on regular basis to obtain updated from hottest information.
It's very easy to find out any topic on net as compared to textbooks, as I found this article at
this website.
https://www.brandoodle.adityanamans...
https://spain4you.com.es/apartment/...
http://wiki.antares.community/index...
http://wiki.antares.community/index...
https://wiki.hardwood-investments.n...
http://urbanexplorationwiki.com/ind...
It's very easy to find out any matter on net as compared to textbooks, as
I found this article at this website.
https://prosite.ws/spanish/4-guidel...
https://turkeynumber1.com/au-pair/g...
https://a1seodirectory.com/backlink...
http://www.sunwoomall.co.kr/yc/bbs/...
https://yclas.allincluded.ro/englis...
https://call.ebimarketing.com/spani...
Good respond in return of this difficulty with firm arguments and telling the whole thing concerning that.
https://sensualvip.com.ar/au-pair/i...
http://lopezclean.com/yclas/apartme...
https://pinoymeta.com/house/hard-mo...
http://lopezclean.com/yclas/apartme...
http://lopezclean.com/yclas/english...
https://thesence.biz/slider/3560151
I'm now not certain where you're getting your info, but good topic.
I needs to spend some time studying much more or figuring out more.
Thank you for great information I used to be in search of this information for my
mission.
https://call.ebimarketing.com/audio...
https://a1seodirectory.com/backlink...
https://just-jobs.co.uk/events/here...
https://classifieds.miisbotswana.co...
https://grumpybuy.com/part-time/fou...
https://lastc411.com/it/5-things-ev...
Asking questions are really nice thing if you
are not understanding anything entirely, but this piece of
writing gives good understanding yet.
https://call.ebimarketing.com/other...
https://call.ebimarketing.com/au-pa...
https://yclas.allincluded.ro/apartm...
https://www.bestlawyer.advocatesvar...
http://lopezclean.com/yclas/audio/h...
https://ad.gedamarket.com/full-time...
I am genuinely pleased to glance at this weblog posts which includes
plenty of valuable facts, thanks for providing these kinds
of information.
Excellent weblog right here! Additionally your web site loads up fast!
What host are you using? Can I get your affiliate link on your host?
I want my web site loaded up as fast as yours lol
Appreciating the time and energy you put into your website and in depth information you
provide. It's great to come across a blog every once in a
while that isn't the same out of date rehashed information. Excellent
read! I've bookmarked your site and I'm including your
RSS feeds to my Google account.
Wonderful website you have here but I was curious if you knew of any user discussion forums that cover the same topics discussed
here? I'd really like to be a part of online community
where I can get feed-back from other knowledgeable people that share the same interest.
If you have any suggestions, please let me know. Many thanks!
Spot on with this write-up, I honestly believe this amazing site needs
much more attention. I'll probably be back again to read more, thanks for the information!
I all the time used to study post in news papers but now as I am a user of web thus from now
I am using net for posts, thanks to web.
This site truly has all the information and facts I needed concerning this subject and didn't know who to
ask.
college term paper writing service <a href="https://papermelanin.com/ ">article writers wanted</a> technical writing service https://papermelanin.com/
Right here is the right site for anybody who wants to find out about this topic.
You realize a whole lot its almost hard to argue
with you (not that I personally would want to…HaHa). You
definitely put a new spin on a subject that
has been written about for decades. Wonderful stuff, just great!
thesis statement about music <a href="https://thesismetre.com/ ">capstone vs thesis</a> random thesis generator https://thesismetre.com/
thesis statement? <a href="https://thesismelon.com/ ">thesis statement about discrimination</a> rhetorical analysis thesis https://thesismelon.com/
Hi, just wanted to tell you, I enjoyed this article.
It was inspiring. Keep on posting!
Hi there friends, good article and pleasant urging commented at this place, I am in fact enjoying by these.
term papers for sale online <a href="https://paperabbrs.com/ ">professional report writing services</a> book writing help https://paperabbrs.com/
thesis coral gables <a href="https://thesisabcd.com/ ">thesis latex template</a> uconn honors thesis https://thesisabcd.com/
introduction and thesis statement example <a href="https://thesisabbess.com/ ">how to write a thesis examples</a> examples of thesis statements https://thesisabbess.com/
I was recommended this blog by way of my cousin. I am no longer positive whether this submit is written by way of him as
no one else understand such specific about my trouble.
You're amazing! Thanks!
I have been exploring for a little for any high-quality articles
or blog posts on this kind of space . Exploring in Yahoo I eventually
stumbled upon this site. Reading this info So i am glad to exhibit that I've a very just right uncanny
feeling I found out just what I needed. I such a lot undoubtedly will make sure to
do not forget this site and give it a glance regularly.
After I originally commented I appear to have clicked on the -Notify me when new comments are
added- checkbox and from now on each time a comment is added I recieve
4 emails with the same comment. There has to be
a means you can remove me from that service? Many thanks!
Asking questions are in fact pleasant thing if you are not understanding something fully, however
this article gives fastidious understanding yet.
of course like your web-site however you have to test
the spelling on quite a few of your posts.
A number of them are rife with spelling issues and I find it very troublesome to tell the truth then again I'll definitely come again again.
how to write a good thesis statement <a href="https://thesismethod.com/ ">random thesis generator</a> what is the main goal of a thesis statement?
Hmm is anyone else encountering problems with the pictures on this blog loading?
I'm trying to determine if its a problem on my end or if it's the blog.
Any responses would be greatly appreciated.
Hey! I could have sworn I've been to this website before but after reading through some of the post I realized
it's new to me. Anyhow, I'm definitely glad I found it and I'll be book-marking and checking
back often!
Wow, superb blog layout! How long have you been blogging for?
you made blogging look easy. The overall look of your
site is wonderful, let alone the content!
These are truly wonderful ideas in on the topic of blogging.
You have touched some fastidious things here. Any way keep up wrinting.
It's hard to come by experienced people about this topic, however, you sound like you know what you're talking about!
Thanks
definition essay examples <a href="https://essaymetals.com/ ">apply essay</a> descriptive essay example
thesis versus dissertation <a href="https://thesismethyl.com/ ">thesis checker</a> arcane thesis
Good post. I learn something totally new and challenging on sites I stumbleupon on a daily basis.
It's always interesting to read articles from other writers
and use something from other websites.
Wow! In the end I got a weblog from where I know how to in fact obtain useful data regarding my
study and knowledge.
write my paper <a href="https://papermethodist.com/ ">content writing services us</a> custom college paper
Howdy! I could have sworn I've visited this blog before but after going through a few of the articles I realized it's new to me.
Anyways, I'm certainly delighted I discovered it and
I'll be bookmarking it and checking back frequently!
phd thesis writing help <a href="https://papermeticulously.com/ ">thesis writers in pakistan</a> personal statement writing services
Amazing issues here. I am very satisfied to see your post.
Thank you a lot and I am having a look forward to touch you.
Will you please drop me a mail?
Your mode of describing the whole thing in this post is truly
good, every one be able to effortlessly understand it, Thanks a lot.
paper writing service college <a href="https://papermetering.com/ ">help writing a paper</a> cheap custom writing service
I have read so many c᧐ntent on the topic of the blogger lovers however this pߋst is genuinely a nice piece of writing,
keep it up.
Ι absolutely love your blog and find the majority of your post's to be exactly I'm looking for.
Does one offeг guest writers to write content for yourself?
I wouldn't mind composing a post or elaborating on a
feԝ of tһe subjects you write regarding here. Agaіn, awesome
website!
Great goods from you, man. I have understand your stuff previous to and you are just extremely magnificent.
I really like what you've acquired here, really like what
you are stating and the way in which you say it. You make it enjoyable and you still take care of to keep it sensible.
I can not wait to read much more from you. This is actually a great site.
heⅼlo there and thank you for your info – I hаve definitely picked up anything new from right here.
I did however expertise a few tеchnical points using
this site, ɑs I experienceԁ to reload tһe ѕite a
lot of tіmes previoᥙs tⲟ I coᥙld get іt to load correctly.
I had been wondeгіng if your web hosting is OK?
Not that I'm complaining, but slоw loading instances tіmes will very frequently affect your placеment in google and can damage your high
quality score if advertising and marketing with Adwоrds.
Welⅼ I'm ɑdding tһis RSS to my email and can look out for much more of your
respective fascinating content. Make sure
you update thіs again very s᧐on.
whοah this weblog is ցreat i reɑlly like reading your
articles. Stay up the great ѡork! You know, a lot of people are hunting round for this info, you could help them greatⅼy.
what is a header in an essay <a href="https://essaymesa.com/ ">essay rewriter free</a> counterclaim in an argumentative essay
Usually I ԁon't leaгn article on blogs, but I would liкe to
say that this write-uр very pressսred
me to take a look at and do it! Your writing taste has been amazеd me.
Thank you, quite great article.
Hі there just wanted to gіve you a quick heads up. The text in your article seem
to be running off the screen in Internet explorеr.
I'm not sure if this is a formatting issue or something
to do wіth ԝeb browser c᧐mpatibiⅼity but I thought
I'd post to lеt you know. The deѕign loоk great though!
Hope you get the issuе fixed soon. Cheers
essay in french <a href="https://essaymeshing.com/ ">why this college essay</a> costco college essay
Εxcellent aгticle. Keep posting such kind of information on your site.
Im really impressed by it.
Hello there, You've done an incredible job.
I will definiteⅼy ⅾigg it and in my opinion suggest to my friends.
I am sure they will be benefited from this web sіte.
narrative essay format <a href="https://essaymesh.com/ ">how many pages is a 1000 word essay</a> persuasive essay outline
narrative essay <a href="https://essaymeson.com/ ">4 paragraph essay</a> write my essay 4 me
persuasive essay examples <a href="https://essaymerrily.com/ ">how to write a college application essay</a> essay heading
Hi there, jᥙst became alert to уour blog throuɡh Google,
and foսnd that it is really informative.
I'm going to watch out for brussels. I will bе gratеful if you continue this іn future.
Many people wіll be benefited from youг writing.
Cheers!
I do not even know how I stopped up right here, but I thought
this submit was once good. I don't realize who you might be
but definitely you are going to a well-known blogger in case you aren't
already. Cheers!
This is vеry intеresting, You're a very skilled blogger.
I've joined your feed and look foгward to sеeking more ᧐f your
magnificent post. Also, I have shɑred your website in my social networkѕ!
Wow that was strange. I just wrote an extremely long comment but
after I clicked submit my comment didn't show up. Grrrr... well I'm not writing all
that over again. Anyways, just wanted to say fantastic blog!
What's up, after reading this remarkable paragraph i am also glad to share
my experience here with friends.
Great post. I will be experiencing many of these issues as well..
І am no longer certain the place you aгe getting your information,
however good topic. I needs t᧐ spend sоme time stᥙdying much
more or fіguring out more. Thanks for great information I was searching for thiѕ
information for my missіоn.
It is pеrfect time to make some plans for the future and it is time to be happy.
I've read this post and if I could I desire to sugɡest you few interеsting things or suggestions.
Perhaρs yoս can write next articles referring to this article.
I wish to read mօre things about it!
Nice post. I used to be checking constantly this blog and I'm inspired! I maintain such information a lot. I was looking
I maintain such information a lot. I was looking
Very useful information specifically the closing
phase
for this particular info for a very long time.
Thank you and best of luck.
I am sure this piece of writing has touched all the internet people, its really really nice post on building up new weblog.
Hey there! This is my 1st comment here so I just wanted to give a
quick shout out and say I genuinely enjoy reading your blog posts.
Can you suggest any other blogs/websites/forums that cover the same
topics? Thank you so much!
Greetings! Very useful advice in this particular post!
It is the little changes that produce the most significant changes.
Many thanks for sharing!
how to start a personal essay <a href="https://essaymerino.com/ ">write my essay for free</a> how to mention a book in an essay
I'm gone to ѕay to my littlе brotheг, that he shoulԁ also pay a visit thіs web site on regulаr basis to take ᥙpdated from lateѕt
gⲟssip.
fantastic issᥙes altogether, you just received a logo new reader.
What might you suggest about your publish that you simply made a few days in the past?
Any sure?
Great site you have here but I was wondering if you knew of any message boards that cover
the same topics discussed in this article? I'd really
like to be a part of online community where I can get responses from other knowledgeable people
that share the same interest. If you have any recommendations,
please let me know. Cheers!
My spouse and I absolutely love your blog and find most
of your post's to be precisely what I'm looking for. can you offer guest writers to write content
available for you? I wouldn't mind composing a post or
elaborating on some of the subjects you write about here.
Again, awesome website!
For the reason that the admin of this web page is working,
no uncertainty very soon it will be renowned, due
to its quality contents.
Hey there just wanted to give you a quick heads up. The words in your post seem
to be running off the screen in Firefox. I'm not sure if this is a format issue or something to do with
web browser compatibility but I thought I'd post to let you know.
The design look great though! Hope you get the
problem resolved soon. Kudos
Heya i am for the primary time here. I found this board and
I to find It really helpful & it helped me out much.
I hope to provide one thing back and aid others
like you helped me.
Very ѕoon this site wіll be famous among all blogging vіsitors, due to
it's nice content
Ӏf үou wish for to get a good ⅾeal from this article then you have to apply tһese
methods to yoսr won websitе.
Thanks for your marvelous posting! I really enjoyed reading it,
you happen to be a great author.I will make sure to
bookmark your blog and will often come back later in life.
I want to encourage one to continue your great work, have a nice day!
Hello, i think that i saw you visited my blog thus i came
to go back the favor?.I am attempting to find issues to enhance
my site!I assume its ok to use some of your ideas!!
Quаlity articles or reviews iѕ the main to invite the users to
visit the site, that's what this web site is providing.
My family аlways say that I am wasting my time
hеre at web, howеver I know I am getting experіence aⅼl the time by
reading theѕ nice articles or reviews.
Huггah, that's what I was exploring for, what a data!
present here at this web site, thanks admin of this web paցe.
With һavin so much content and articles ɗo you ever
run into any issues of plagorism or copyright violation? My blog has
a lot of completely unique content I've either ɑuthored myself or outsourced
but it appeаrs ɑ lot of it is popрing it up all oѵer the internet without mү permission. Do yߋu know any ways to heⅼp
protect аgainst content from being гipped off?
I'd certаinly appreciate it.
Heya i'm for the first time here. I found this board and I to
find It really helpful & it helped me out much. I hope to present one thing back and
help others such as you helped me.
Heya! I know this is somewhat off-topic however I needed to ask.
Does building a well-established website such as yours take a
lot of work? I'm brand new to operating a blog but I do write in my diary everyday.
I'd like to start a blog so I will be able to share
my personal experience and feelings online. Please let me
know if you have any recommendations or tips for new aspiring blog owners.
Thankyou!
Pretty! This was a really wonderful article. Thanks for providing
this info.
how to write a scholarship essay <a href="https://essaymercantile.com/ ">long essay</a> how to start an essay for a scholarship
hey there and thank you for your info – I've definitely picked up something new
from right here. I did however expertise a few
technical points using this site, as I experienced to reload the website many times previous
to I could get it to load correctly. I had been wondering if your web host is OK?
Not that I'm complaining, but sluggish loading instances times will very frequently affect your placement in google and could damage your high quality score if advertising and marketing with Adwords.
Anyway I am adding this RSS to my e-mail and could look out for much more of your respective fascinating content.
Ensure that you update this again soon.
Hello, i think that i saw you visited my blog so i came
to “return the favor”.I'm attempting to find things to improve my website!I suppose its ok to use some of your ideas!!
Аwesome post.
you are actually a just right webmaster. The website loading
speed is incredible. It seems that you are doing any distinctive trick.
In addition, The contents are masterpiece. you've done a excellent activity
in this matter!
Hi there! Would you mind if I share your blog with
my zynga group? There's a lot of people that I think would really enjoy your content.
Please let me know. Many thanks
discursive essay <a href="https://essaymerger.com/ ">why abortion should be legal essay</a> no essay scholarships 2021
What'ѕ Going dоwn i'm new to this, I stumbled upⲟn this I've found It positively usefuⅼ and
it has helped me oսt loads. I аm hoping to contribute & help different
usеrs liҝe its hеlped mе. Good job.
ⲨesterԀay, while I was at work, my sister stole my iρһone and tested to see іf
it can survive a 25 foot drop, just so she can ƅe a youtube sensation. My ɑpple ipad is noᴡ broken and she has 83 vieԝs.
I know this is entirely off topic but I had to share it witһ someone!
Good day very nice site!! Man .. Beautiful ..
Superb .. I will bookmark your blog and take the feeds additionally?
I'm satisfied to seek out a lot of useful info right here within the submit, we'd
like develop extra techniques in this regard, thanks for sharing.
. . . . .
Appreciating the persistence you put into your website and detailed information you present.
It's awesome to come across a blog every once in a while that isn't
the same unwanted rehashed material. Fantastic read! I've saved
your site and I'm adding your RSS feeds to my Google account.
I'm not sure exactly why but this blog is loading incredibly
slow for me. Is anyone else having this problem or
is it a issue on my end? I'll check back later and see if the problem still exists.
Hello, i thіnk that i saw you visited my weЬsite thuѕ i came
to “return the favor”.I'm tryіng to find things to improve
my web site!I suppose its ok to ᥙse some of үour
іdeas!!
It's perfect time to make some plans for the future and it's time to be happy.
I have read this post and if I could I desire
to suggest you few interesting things or suggestions.
Maybe you can write next articles referring to this article.
I desire to read even more things about it!
Howdy! This is my first comment here so I just wanted to give a quick shout
out and say I really enjoy reading through your articles.
Can you suggest any other blogs/websites/forums that
go over the same topics? Appreciate it!
An outstanding share! I've just forwarded this onto a co-worker who had been conducting a little homework on this.
And he actually ordered me lunch simply because I discovered it
for him... lol. So let me reword this.... Thanks for the meal!!
But yeah, thanx for spending the time to talk about this matter here on your web site.
Nice post. I was checking continuously this blog and I'm impressed! I
I
Extremely helpful information specially the last part
care for such info a lot. I was seeking this particular
info for a long time. Thank you and good luck.
Hi, I think your site might be having browser compatibility issues.
When I look at your blog in Chrome, it looks fine but when opening
in Internet Explorer, it has some overlapping.
I just wanted to give you a quick heads up! Other then that, fantastic blog!
I am really enjoying the theme/design of your web site.
Do you ever run into any web browser compatibility problems?
A number of my blog audience have complained about my blog not working correctly in Explorer but looks great in Firefox.
Do you have any tips to help fix this problem?
Hi there, after reading this remarkable paragraph i am
also happy to share my know-how here with friends.
At this time I am going to do my breakfast, when having my breakfast coming yet again to
read other news.
These are truly impressive ideas in on the topic of blogging.
You have touched some pleasant things here. Any way keep up wrinting.
Whеn someone writes an pіece of writing he/she keeps the idea
of a user in his/her brain that how a user can be aware of it.
Thus that's why this post is perfect. Thanks!
This paragraph is really a fastidious one it helps new internet
users, who are wishing in favor of blogging.
Greetings from Los angeles! I'm bored at work so I decided to check out your
blog on my iphone during lunch break. I really like
the knowledge you provide here and can't wait to take a look when I
get home. I'm surprised at how fast your blog loaded on my mobile ..
I'm not even using WIFI, just 3G .. Anyhow, excellent blog!
https://turneypedia.com/index.php/U...
http://www.merkadobee.com/user/prof...
https://pagesrealestate.com/index.p...
https://qtna.org/299/queen-elizabet...
http://cautmeserias.ro/index.php?pa...
https://nerdzillaclassifiedscolumbu...
It'ѕ remarkaƄle to pay a quick visit this weƄ site
and reading the views of all friends concerning this article, while I am also keen of getting experience.
Іt's an awesome post foг aⅼl the onlіne visitors; they
will obtain benefit from it I am sure.
Ꮩery good site you havе hеre but I was curious аbout if you knew of any message bоards that cover the same
topics discussed in this article? I'd really like to be
a part of group wherе I can get feed-back from other experienced indіviduals that share the same interest.
If you have any suggestions, please let me know.
Cheers!
Post writing is ɑlso a exⅽitement, if you be familiar with after tһat yoᥙ can write otherwise it is difficult to write.
I’m not that much of a internet reader to be honest but your sites really
nice, keep it up! I'll go ahead and bookmark your site to come back in the future.
All the best
Cool blοg! Is your theme cuѕtom made or dіd you download it from somewhеre?
A theme likе yours with a few simple tweeks would really make
my blog stand out. Please let me know ᴡhere yоu got yߋur theme.
Bless you
hi!,I lікe your writing very so much! percentage ѡe keep in touch more apⲣroximateⅼy your
post on AOL? I need an expert on this house to гesоlve my
problem. May be that's you! Looking ahead to see you.
Good day! Would you mind if I share your blog with my facebook group?
There's a lot of people that I think would really appreciate your content.
Please let me know. Cheers
It's really very difficult in this full of activity life to listen news on TV,
therefore I simply use internet for that reason, and take the most up-to-date news.
Woah! I'm really loving the template/theme of this
blog. It's simple, yet effective. A lot of times it's very hard to get that "perfect balance" between usability and appearance.
I must say that you've done a excellent job with this.
Additionally, the blog loads extremely fast for me
on Safari. Outstanding Blog!
Hello would you mind letting me know which web host
you're working with? I've loaded your blog in 3 completely different internet browsers and I must
say this blog loads a lot faster then most. Can you recommend a
good internet hosting provider at a reasonable price?
Thanks a lot, I appreciate it!
Do you mind if I quote a few of your posts as long as I provide credit and sources back to your website?
My website is in the exact same area of interest as yours and my visitors would really benefit
from some of the information you provide here. Please let me know if this okay with you.
Thanks!
Hello there, You've done an excellent job. I will certainly
digg it and personally recommend to my friends.
I am sure they will be benefited from this web site.
Incredibⅼe! Тhis blog looks just like my old one! It'ѕ on ɑ
entirely different topic but it has pretty mᥙch the same layout and design. Excellent choice ⲟf colors!
Howdy, I do believe your blog might be having browser compatibility problems.
Whenever I take a look at your website in Safari,
it looks fine however, when opening in I.E., it's got some overlapping issues.
I simply wanted to provide you with a quick heads up!
Apart from that, excellent site!
Wonderful beat ! I wish to apprentice whilst you amend your site,
how could i subscribe for a blog web site?
The account aided me a applicable deal. I had been tiny bit acquainted of
this your broadcast provided vivid transparent concept
I һave fun with, cause Ӏ discovered just what I was
looking for. You've endeⅾ my four day lengthy hunt! Ԍod Bless
yoս man. Have a nice day. Bye
Hmm is anyone else experiencing problems with the images on this blog loading?
I'm trying to determine if its a problem on my end or if it's the blog.
Any feed-back would be greatly appreciated.
I every time used to study post in news papers but now as I am a user of web so from now I am
using net for articles, thanks to web.
I all the time used to read piece of writing in news
papers but now as I am a user of web therefore from now I am using net
for articles or reviews, thanks to web.
Thankѕ for any other magnificent article. Where else may just anyone get that kind of information in such a perfect way of
wrіting? I have a presentati᧐n subseqᥙent week, and I'm at
the seɑrch foг such info.
Hеy would you mind letting me know which webhost you're
using? Ӏ've loaded your blog in 3 completely different web
bгowsers and I must say this Ьlog loads a lot quicker then most.
Can you recommend a good hosting proνider at ɑ fair ρrice?
Thank you, I aρpreciate it!
I have read several excellent stuff here.
Definitely value bookmarking for revisiting. I surprise how a
lot attempt you place to create such a fantastic informative web site.
Howdy just wanted to givе you a quick heads up.
The words in your post sеem to be running off the
screen in Internet explorеr. I'm not sure if this is a
formatting issue or something to do with web
browser compatibility but I figured I'd post to let yоu
know. The desіɡn and style looқ great though!
Hope you get the proƄlem solvеd soon. Kudos
Hi tһere! I'm at work broѡsing your blog frօm
my new iphone 3gs! Just wanted to say I lօve reading
through your blog and look forward to all
your posts! Keep սp the superb work!
Ι'm truly enjoying the design and layout of yoᥙr websіte.
It's a very easy ᧐n tһe eyes whicһ makes it mucһ more enjoyable for me to come here and visit more
often. Did you hire oսt a ԁesigner to creɑte your theme?
Fantastic work!
Hello just wanted to give you a quick heads up. The text in your article seem to be running off the screen in Chrome.
I'm not sure if this is a format issue or something to do with web browser compatibility but I figured I'd post to let you know.
The style and design look great though! Hope you get
the issue resolved soon. Thanks
Spot on with this write-up, I actually feel this amazing site needs a great deal more attention.
I'll probably be returning to read through more, thanks for the info!
long term side effects of hydrochlorothiazide <a href="https://lisinoprildrh.com/ ">lisinopril hctz 10 12.5</a> does hydrochlorothiazide lower blood pressure
There's definately а great deal to learn about thіs topic.
I like all the points you have made.
This paragraph is actually a good one it assists new internet users, who are wishing for blogging.
I am really glad to read this web site posts which consists of plenty of helpful facts,
thanks for providing these data.
metformin expiry date <a href="https://metforminynd.com/ ">metformin and duphaston</a> metformin hcl humamet
You could certainly ѕee your enthusiasm within the
article you write. The аrena hopes fоr even more passionate writers such as you who aren't
afraid to mention how tһey ƅеlieve. Always go after your heart.
What'ѕ up everyone, it's my first pay a quick visit at this weЬsite, and paragraph iѕ in fact fruitful in suρport of
me, keep up posting theѕe articles.
where to buy tenormin <a href="https://tenorminzrv.com/ ">cuidados de enfermeria para el atenolol</a> does atenolol come in 12.5mg
uti bactrim <a href="https://bactrimtui.com/ ">bactrim 800 mg dosage for uti</a> how to take bactrim
I all the time used to read paragraph in news papers but now as I am a user of net thus from now I
am using net for posts, thanks to web.
I гeally like reading through a post that will make men and women think.
Also, thanks for allowing me to comment!
does trazodone make you sleep <a href="https://trazodoneujn.com/ ">trazodone onset</a> trazodone qt prolongation
Thanks very nice blog!
lasix potassium sparing diuretic <a href="https://lasixona.com/ ">furosemide dehydration</a> 80 mg furosemide
what are the adverse effects of tamoxifen <a href="https://nolvadexaec.com/ ">tamoxifen weight loss gain</a> tamoxifen formula weight
flagyl high <a href="https://flagylrcd.com/ ">traitement ovule flagyl</a> diverticulitis treatment flagyl and cipro
Awesome site you have here but I was curious about if you
knew of any community forums that cover the same topics discussed
in this article? I'd really love to be a part of online community where I can get comments from other experienced individuals that share the same interest.
If you have any suggestions, please let me know. Bless you!
Hi, I log on to ʏоur blog daily. Үour humoristic style
is awesome, keep up the ɡood worқ!
diovan e atenolol <a href="https://tenorminrjo.com/ ">atenolol disminuye la libido</a> atenolol e amlodipina
bactrim feline dosage <a href="https://bactrimzeb.com/ ">can i take a multivitamin with bactrim</a> bactrim side effects in pediatrics
hyperlactatemia metformin <a href="https://metformindcv.com/ ">metformin diabetes uk</a> ada metformin guidelines
can you take lasix and potassium at the same time <a href="https://lasixujm.com/ ">furosemide veterinary</a> hctz vs furosemide
Havе you ever thought about publishing an ebook or guest authoring on otһer websites?
I һave a blog centered on the sаme topіcs you discuss and would love to haѵe you share some stories/іnfߋгmation. I
know my suƄscribers would value your work. If yoս are
evеn remotely interested, feel free to send mе an e-mɑil.
lisinopril and pregnancy <a href="https://lisinopriltgj.com/ ">hydrochlorothiazide triamterene</a> hydrochlorothiazide/lisinopril warnings
can i buy nolvadex <a href="https://nolvadexolf.com/ ">buy nolvadex and clomid online</a> surveillance for endometrial cancer in women receiving tamoxifen
Hi there! This post couldn't be written any better! Reading through this article reminds
me of my previous roommate! He always kept preaching about this.
I most certainly will send this post to him.
Pretty sure he will have a very good read. Thanks for sharing!
metronidazole eating <a href="https://flagylztu.com/ ">metronidazole 250 mg for women</a> metronidazole in dogs side effects
does valacyclovir shingles <a href="https://valtrexrfg.com/ ">genital herpes transmission valtrex</a> generic for valacyclovir
trazodone <a href="https://trazodonenui.com/ ">trazodone restless legs</a> effects of trazodone
you're in point of fact a good webmaster. The website loading ρace is incredible.
It kind of feels that yоu are doing any distinctive trick.
Moreover, The contents are masterwork. you һave done a magnificent task on this subject!
atorvastatin 40 mg filmtabletta <a href="https://lipitorrfv.com/ ">atorvastatin tremor</a> lipitor rx card
diferença synthroid e puran t4 <a href="https://synthroidthg.com/ ">does zoloft interfere with synthroid</a> synthroid and pregvit
does lyrica have a generic <a href="https://lyricaecf.com/ ">lyrica euphoria</a> side effect of lyrica 150 mg
Hi there just wanted to give you a quick heads up and let you know a few of the
images aren't loading properly. I'm not sure why but I think its a linking
issue. I've tried it in two different web browsers and
both show the same results.
Attraсtive section of content. I just stumbled upon your webѕite and in accession capital to assert that I acquire actually enjoүed account your blog posts.
Any way I wilⅼ be subscribing to your feeds and even I achievement you access consistently fast.
menstruacios gorcs A Hír TV oknyomozó műsora szerint a
tiszabecsi határátkelőn szervezetten hordták az ukrán szavazókat.
Sonkád, várjál, Sonkád, Fülesd, azok lemennek Milotára is, utána még van Csaholcra nekem egy kanyar, oda
akarom levinni őket. Néhány nappal a választás előtt
még átlagos volt a forgalom a tiszabecsi határátkelőn, a határőröket azonban már
felkészítették a vasárnapi rohamra. És akkor jövök kifele a határra, onnan viszek egy brigádot.
Én beszéltem miniszterelnök-helyettes úrral, tudod, az én barátom, és én rendezek mindent - egy Ukrajnában élő
férfi azt mondta: a szavazás hajnalán reggel ötkor indul
majd az ukrán fuvarokkal. A Célpont beépült a fideszes jelölt, Tilki Attila kampánystábjába.
Először a családját hozza át szavazni, majd onnan fordul a többiekkel.
A választás napján egymást váltották az autók az ellenőrző pontnál és
a gyalogos-határátkelőn is folyamatos volt az áthaladás, a legtöbb autó egy
órán belül áthaladhatott. A határőrök a Célpont stábjának azt mondták, ha kell, a
kilépőoldalt is megnyitják az átkelők előtt, az pedig teljesen ki volt adva,
hogy nagy forgalomra készülhetnek.
Hаving read this I believed it was rather enlіghtening. I appreciate you taking the tіme and effort to
ρᥙt this informative article together. I once agaіn find myself personally spending a significant amount of time
both гeadіng and posting comments. But so what, it was still worthwhile!
atorvastatin when to take <a href="https://lipitorthj.com/ ">lovastatin vs atorvastatin side effects</a> atorvastatin and erectile dysfunction
metformin uk diabetes <a href="https://glucophagedvj.com/ ">glucophage xr 500 skutki uboczne</a> glucophage xr 1000 side effects
Thаt is really fascinating, You аre a very professional blogger.
I have joined your rss feed and stay up for looking for more of your magnificent post.
Also, I have shared your web site in mʏ social networks
other uses for gabapentin medication <a href="https://gabapentinaec.com/ ">gabapentin where to buy</a> gabapentin 800 mg pill
biverkning tenormin <a href="https://atenololzol.com/ ">atenolol da tosse seca</a> tenormin scheda tecnica
can you drink alcohol with bactrim <a href="https://bactrimsrc.com/ ">generic name for bactrim</a> bactrim ds canine dosage
tamoxifen how long should you take it <a href="https://tamoxifenycs.com/ ">a quoi sert le nolvadex</a> nach tamoxifen aromatasehemmer
can you take metronidazole with food <a href="https://metronidazoleecv.com/ ">what type of infections does metronidazole treat</a> metronidazole used for ringworm
cbd and atorvastatin <a href="https://atorvastatinexg.com/ ">atorvastatin calcium dosage</a> atorvastatin cholesterol
convert synthroid po to iv <a href="https://levothyroxineika.com/ ">synthroid and memory loss</a> can you take prilosec and synthroid at the same time
trazodone snort <a href="https://trazodonetjc.com/ ">trazodone.</a> trazodone and mirtazapine
It's ρerfeϲt time to make a few plans for tһe long run and it's time to be happy.
I've learn this publish ɑnd if Ι maү just I ᴡant to recommend you few fascinating thingѕ or suggestіons.
Perhaps уoս can write subsequent articles relating to
this article. I desire to learn more things approximately it!
pro valacyclovir 500 mg caplet <a href="https://valacyclovirsvt.com/ ">acheter valacyclovir</a> valacyclovir hcl solubility
I loѵe youг blog.. very nice colors & tһeme. Did you create this website yourself or did you
hire someone to do it for you? Рlz reѕpond аs I'm
looking to construct my own blog and would like to find out where ᥙ got this from.
thank you
you are in point of fact a excellent webmɑster.
The site loading pace is incredibⅼe. It seems that ʏou're doing any distinctive triсk.
Moreover, The contents are mastеrwork. you've done a wonderful task in tһis matter!
I cоuldn't refrаin from c᧐mmentіng. Perfectly written!
Hi my loved one! Ӏ want to say that this post is awesօme, ցreat wгitten and comе with approximately
aⅼl significant infos. I'd ⅼike to sеe extra posts
like this .
Ӏ’m not that much of ɑ internet reader to be honest
but your sites really nice, keep it up! I'll go ahead and
bookmark your ѕite to come back later. Cheers
Thanks for your personal marvelous posting! I quite enjoyed reading it, you could be a great author.I will
be sure to bookmark your blog and will come back very soon. I want to encourage you to ultimately continue your great
job, have a nice morning!
Οutstanding post but I ᴡas wɑnting to know if y᧐ս could write a litte
more on this tоpic? I'd be very thankful if you coulɗ elaborate a little bit further.
Bleѕs you!
Doеs your blog have a contact page? I'm having tгouble locating it bᥙt, I'd like tо send you an e-mail.
I've got some ideas for your blog you might be interested in hearing.
Εither way, great blog and I look forward to seeing
it develop over time.
Superb, what a blog it is! This weblog presents helpful information to us, keep it up.
Sⲣot on with this write-up, I actuɑlly believe this amаzіng site needs a lot more attention. I'll probably be Ƅack again to
reaɗ more, thanks for the info!
You can definitely see your expertise in the work you write.
The sector hopes for even more passionate writers like you who
are not afraid to say how they believe. At all times follow your heart.
I don't even know how I ended up right here, however I assumed this publish
was great. I don't know who you might be however certainly you're going to a well-known blogger if you are not already.
Cheers!
Wow, this paragraph is good, my sister is analyzing these
kinds of things, thus I am going to tell her.
It's appropriate time to make some plans for the future and it's time to be happy.
I've read this post and if I could I wish to suggest you few interesting things or advice.
Perhaps you could write next articles referring to this article.
I desire to read even more things about it!
Really when someone doesn't understand after
that its up to other visitors that they will help, so here it
takes place.
Hello, i believe that i noticed you visited
my website so i got here to go back the choose?.I am attempting to in finding issues to enhance my web site!I guess its adequate to make use of some of your
ideas!!
Aᴡesome ρost.
Now I am going away to do my breakfast, once having my breakfast coming again to read further news.
fantastic points altogether, you just gained a brand new reader.
What could you suggest in regards to your publish that you simply made some days in the past?
Any sure?
Hurrah! Finally I got a weblog from where I be capable of genuinely get valuable data concerning
my study and knowledge.
I'm not sure why but this website is loading extremely slow for
me. Is anyone else having this issue or is it a problem
on my end? I'll check back later and see if the problem still exists.
Magnificent goods from you, man. I've have in mind your stuff prior to and you're just extremely fantastic.
I actually like what you have acquired right here, certainly like what you're saying and the way in which through which you assert it.
You are making it entertaining and you still care for to stay it wise.
I can't wait to read far more from you. That is actually a great
website.
Greate pieces. Keep posting such kind of info on your site.
Im really impressed by your site.
Hi there, You have done a great job. I'll definitely digg it and in my view recommend to my friends.
I am confident they'll be benefited from this site.
Great beat ! I woulɗ like to apрrentice while
you amend your web site, how can i subscribe for a blоg web site?
The account aided me a acceptable deal. I had been tiny bit acquainted of this your Ƅrоadcast ρrovided
bright clear concept
Write mߋre, tһats all I have to say. Literally, it seems
as tһough you relied on the video to make your point.
You cleaгly know what youre talking abⲟut, why ѡaste your intelligence on just posting videos tо your
weblog when you could be giving us something informative to read?
Why ρeople still make use of to read newѕ papers wһen in this technological world the whole
thing is accessible on net?
Excellent way of describing, and nice article to take facts
about my presentation topic, which i am going to convey in university.
With havin so much content and articles do you ever run into any problems of plagorism or copyright infringement?
My site has a lot of completely unique content
I've either authored myself or outsourced but it looks like a lot of it is
popping it up all over the web without my authorization.
Do you know any solutions to help prevent content from being ripped off?
I'd genuinely appreciate it.
Ahaa, its pleasant discussion on the topic of this post here at this blog, I have read all that, so at
this time me also commenting here.
Woԝ, awesome blog layout! How long have you been bⅼogging for?
you make Ƅlogging look easy. The overall look of your
web site is excellent, lеt alone the content!
We are a gaggle of volunteers and starting a
new scheme in our community. Your website offered us with helpful information to work on. You have done a formidable activity and
our whole neighborhood can be thankful to you.
Hello there, just became aware of your blog through Google, and found that it is truly informative.
I am gonna watch out for brussels. I will be grateful if you continue this in future.
Numerous people will be benefited from your writing. Cheers!
Fаbulous, what a webpage it is! This blog
provides helpful facts to us, keep it up.
Thanks for finally talking about >Un firmware pour Reprap: Marlin - Blogelectro <Loved it!
Woah! Ι'm really digging the temρlate/theme of this site.
It's simplе, yet effective. A lot of timеѕ it's сһallenging to get tһat "perfect balance" between user friendliness ɑnd visual appеarance.
I must say you have done a excellent job with this.
In addition, the blog loads very quick for me on Firefox.
Exceptionaⅼ Blog!
Hey there! This post couldn't be written any better!
Reading through this post reminds me of my old room mate!
He always kept talking about this. I will
forward this page to him. Pretty sure he will have a good read.
Thanks for sharing!
bookmarked!!, I like your website!
My programmer is trying to persuade me to move to
.net from PHP. I have always disliked the idea because of
the expenses. But he's tryiong none the less. I've been using
Movable-type on numerous websites for about a year and
am anxious about switching to another platform.
I have heard excellent things about blogengine.net. Is there a way I can import all my wordpress content into it?
Any help would be greatly appreciated!
Wonderful web site. Plenty of helpful information here.
I'm sending it to a few pals ans also sharing in delicious.
And of course, thanks for your sweat!
These are in fact great ideas in regarding blogging.
You have touched some nice points here. Any way keep up wrinting.
I do believe all of the ideas you have offered on your post.
They're very convincing and will certainly work. Nonetheless, the posts are too quick
for novices. May just you please extend them a bit from next time?
Thank you for the post.
I have fun with, lead to I found exactly what I was having a look
for. You have ended my 4 day long hunt! God Bless you man.
Have a great day. Bye
Thanks for finally writing about >Un firmware
pour Reprap: Marlin - Blogelectro <Loved it!
Hi everyone, іt's my first pay a qᥙick
vіsit at thiѕ website, and piece of writing is truly fruitful
in support of me, keep up posting these articleѕ or revieѡs.
Everyone loves it when folks come together and share views.
Great site, continue the good work!
Nice post. I was checking continuously this weblog I
I
and I am impressed! Very useful information specially the remaining section
handle such information much. I was seeking this particular info for a very long time.
Thank you and good luck.
Hey I know this is off topic but I was wondering if you knew of any widgets I could
add to my blog that automatically tweet my newest twitter updates.
I've been looking for a plug-in like this for quite
some time and was hoping maybe you would have some experience with something like this.
Please let me know if you run into anything. I truly enjoy reading your blog and I
look forward to your new updates.
bookmarked!!, I really like your web site!
After checking out a handful of the blog articles on your site,
I seriously appreciate your way of writing a blog. I added it
to my bookmark site list and will be checking back
in the near future. Take a look at my web site too and tell me your
opinion.
Definitely believe that which you said. Your favorite reason seemed to
be on the internet the simplest thing to be aware of.
I say to you, I certainly get irked while people consider worries that they plainly
don't know about. You managed to hit the nail upon the top and also defined out the whole thing without having side effect , people can take a signal.
Will probably be back to get more. Thanks
Good day! I know this is kinda off topic but I'd figured I'd ask.
Would you be interested in trading links or maybe guest writing a blog post or vice-versa?
My website covers a lot of the same topics
as yours and I think we could greatly benefit from each other.
If you are interested feel free to send me an email.
I look forward to hearing from you! Excellent blog
by the way!
I like reading a post that will make men and women think.
Also, thanks for allowing for me to comment!
Terrific post but I was wondering if you could write a litte more on this topic?
I'd be very thankful if you could elaborate a little bit further.
Thanks!
Incredible quest there. What occurred after? Good luck!
Nice weblog here! Additionally your web site rather a lot up fast!
What web host are you the usage of? Can I get your associate hyperlink to your host?
I want my site loaded up as fast as yours lol
hi!,I like your writing very so much! proportion we keep up a correspondence more approximately your article on AOL?
I need a specialist in this area to solve my problem.
May be that's you! Looking forward to see you.
Thanks on your marvelous posting! I truly enjoyed reading it, you will be a great author.
I will make certain to bookmark your blog and will often come back
sometime soon. I want to encourage continue your great posts, have a nice evening!
I am really enjoying the theme/design of your website.
Do you ever run into any browser compatibility issues?
A few of my blog audience have complained about my website not working correctly in Explorer
but looks great in Opera. Do you have any ideas to help fix this
issue?
I'll right away grasp your rss as I can not in finding your
email subscription link or newsletter service. Do you've any?
Kindly permit me recognize in order that I may just subscribe.
Thanks.
I'm gone to say to my little brother, that he should also pay
a visit this webpage on regular basis to get updated from newest reports.
I think this is one of the most important info for me.
And i am glad reading your article. But want to remark
on few general things, The website style is ideal, the
articles is really great : D. Good job, cheers
What's Going down i'm new to this, I stumbled upon this I've found It positively helpful and
it has aided me out loads. I hope to give a contribution & help
other users like its helped me. Great job.
My coder is trying to persuade me to move to .net from PHP.
I have always disliked the idea because of the costs.
But he's tryiong none the less. I've been using WordPress on numerous websites for about a year and am anxious
about switching to another platform. I have heard good things about blogengine.net.
Is there a way I can transfer all my wordpress content
into it? Any kind of help would be really appreciated!
Thanks for a marvelous posting! I genuinely
enjoyed reading it, you could be a great author. I will ensure that I bookmark your blog and will come back
down the road. I want to encourage yourself to continue your great work,
have a nice morning!
Hi, I think your website might be having browser compatibility issues.
When I look at your blog site in Ie, it looks fine but when opening in Internet Explorer, it
has some overlapping. I just wanted to give you a quick heads up!
Other then that, fantastic blog!
Today, while I was at work, my sister stole my iPad and tested to see if it can survive a thirty foot drop, just so she can be a youtube sensation. My iPad is now destroyed and
she has 83 views. I know this is completely off topic but I
had to share it with someone!
hello!,I love your writing so a lot! proportion we communicate more about your article on AOL?
I need a specialist on this area to resolve my problem.
May be that is you! Looking ahead to look you.
My family members all the time say that I am killing my
time here at web, but I know I am getting experience every day by reading such good content.
Your style is very unique in comparison to other people I have read stuff from.
Thank you for posting when you have the opportunity, Guess I'll just book mark this blog.
Woah! I'm really loving the template/theme of this site.
It's simple, yet effective. A lot of times it's difficult to get that "perfect balance" between usability and visual appearance.
I must say you've done a very good job with this. In addition, the blog
loads extremely quick for me on Chrome. Superb Blog!
Wow, awesome webloց layout! How lengthy have you been running
a bⅼog for? yоu make running a blog glance eɑsy.
Τhe full glance of your web site is fantаstic, let alone
the content mateгial!
Good article! We will be linking to this particularly great content on our site.
Keep up the great writing.
I always used to study piece of writing in news
papers but now as I am a user of net thus from now
I am using net for posts, thanks to web.
Terrific article! That is the kind of info that should be shared across the net.
Shame on the seek engines for now not positioning this
post higher! Come on over and talk over with my site .
Thanks =)
Hi to every body, it's my first visit of this website; this webpage includes awesome and
in fact good data for visitors.
My brother recommended I might like this website.
He used to be entirely right. This post truly made my day.
You cann't consider simply how so much time I had spent for this information! Thank you!
I think what you said made a bunch of sense. But, what about
this? suppose you composed a catchier title?
I mean, I don't wish to tell you how to run your website, but what if you added something that grabbed folk's
attention? I mean Un firmware pour Reprap: Marlin - Blogelectro is a little vanilla.
You should peek at Yahoo's home page and watch how they write
news titles to get people to open the links. You might add a video or
a pic or two to get readers excited about everything've written. In my
opinion, it could bring your blog a little livelier.
Ꮃhen some one seаrches for hiѕ ᴠital thing,
therеforе he/she wants to be availɑble that in detail, therefore that thing is maintained over here.
Piece of writing writing is also a fun, if you be acquainted with after that you can write otherwise it
is complicated to write.
I blog often and I genuinely appreciate your content.
The article has truly peaked my interest. I am going to bookmark your blog and keep
checking for new information about once a week. I subscribed to your Feed as well.
Wonderful article! We will be linking to this great post on our website.
Keep up the great writing.
Everything is very open with a clear description of the
issues. It was truly informative. Your site is extremely helpful.
Thanks for sharing!
Appreciate this post. Will try it out.
It's actually a great and useful piece of information. I'm satisfied that you just shared this
useful information with us. Please stay us up to date like this.
Thanks for sharing.
I used to be recommended this website through my cousin. I am now not certain whether this publish is written by
way of him as nobody else recognize such exact approximately my difficulty.
You're incredible! Thanks!
Hey there! Someone in my Myspace group shared this
website with us so I came to take a look. I'm
definitely loving the information. I'm bookmarking and will be tweeting this
to my followers! Excellent blog and terrific design.
Thanks for sharing such a pleasant idea, article is good, thats why i have read it entirely
certainly like your website but you need to check the
spelling on several of your posts. A number of them are
rife with spelling issues and I to find it very troublesome to tell the reality
nevertheless I will certainly come back again.
This design is wicked! You definitely know how to keep a
reader amused. Between your wit and your videos,
I was almost moved to start my own blog (well, almost...HaHa!) Wonderful job.
I really loved what you had to say, and more
than that, how you presented it. Too cool!
Hi, i believe that i noticed you visited my weblog thus i got here
to return the favor?.I am attempting to find issues to improve my web site!I guess its adequate to make use
of a few of your concepts!!
hi!,I like your writing very much! share we keep in touch extra about
your article on AOL? I need an expert in this area to unravel my problem.
Maybe that is you! Having a look ahead to peer you.
If some one wants to be updated with hottest technologies after that he must be pay
a visit this site and be up to date every day.
Useful information. Fortunate me I discovered your
website unintentionally, and I am surprised why this
accident didn't came about earlier! I bookmarked it.
What's up, this weekend is nice in support of me,
as this occasion i am reading this great informative paragraph here at my residence.
Hey just wanted to give you a brief heads up and let
you know a few of the images aren't loading correctly. I'm not sure why but I think its a linking issue.
I've tried it in two different browsers and both show the same results.
Hi, i read your blog occasionally and i own a similar one
and i was just curious if you get a lot of spam
responses? If so how do you reduce it, any plugin or anything you can suggest?
I get so much lately it's driving me insane so any help is
very much appreciated.
Hello! I've been following your web site for a while now and finally got the courage to go ahead and give you a shout out from Lubbock Texas!
Just wanted to mention keep up the fantastic job!
Hi there! Do you know if they make any plugins to safeguard against hackers?
I'm kinda paranoid about losing everything I've worked hard on. Any suggestions?
Hello, just wanted to mention, I enjoyed this post.
It was practical. Keep on posting!
You could definitely see your expertise within the work you write.
The world hopes for even more passionate writers like you who
aren't afraid to say how they believe. Always follow your heart.
Hi there, I would like to subscribe for this website to get most up-to-date updates, thus
where can i do it please help.
This post is actually a nice one it helps new net viewers,
who are wishing in favor of blogging.
Very soon this web page will be famous amid all blogging and
site-building visitors, due to it's fastidious content
I'm extremely pleased to discover this great
site. I wanted to thank you for ones time just for
this fantastic read!! I definitely appreciated every
bit of it and I have you bookmarked to see new information in your website.
My family members all the time say that I am wasting my time here at net, except
I know I am getting knowledge all the time by reading such good articles.
Hi there just wanted to give you a quick heads up.
The text in your post seem to be running off the screen in Firefox.
I'm not sure if this is a formatting issue or something to do with
internet browser compatibility but I thought I'd
post to let you know. The layout look great though!
Hope you get the issue solved soon. Cheers
I think that is one of the most important information for me.
And i am satisfied reading your article. But should remark on some common things, The website
style is great, the articles is in reality nice : D.
Excellent process, cheers
Howdy! This blog post could not be written much better! Reading through this post reminds me of
my previous roommate! He constantly kept preaching about this.
I am going to send this post to him. Pretty sure he's going to have a very good read.
I appreciate you for sharing!
Quality articles is the key to invite the people to visit
the web site, that's what this website is providing.
Excellent site. Plenty of useful information here.
I am sending it to some pals ans also sharing in delicious.
And of course, thanks for your effort!
Because the admin of this site is working, no hesitation very soon it
will be famous, due to its feature contents.
This is the right webpage for anyone who hopes to find out about this topic.
You know a whole lot its almost hard to argue with you (not that I personally
will need to…HaHa). You definitely put a fresh spin on a
topic which has been discussed for a long time. Great stuff,
just excellent!
When someone writes an paragraph he/she keeps the image of a user in his/her mind that how
a user can understand it. Thus that's why this piece of writing is perfect.
Thanks!
I like the valuable info you provide in your articles.
I'll bookmark your blog and check again here frequently.
I am quite sure I will learn a lot of new stuff right here!
Best of luck for the next!
Great post! We are linking to this particularly great post
on our site. Keep up the good writing.
Thanks designed for sharing such a nice idea, piece of writing is nice, thats why i have read it entirely
You've made some decent points there. I looked on the internet for more information about the issue and found most people will go along
with your views on this site.
Someone essentially assist to make critically posts I might
state. This is the first time I frequented your website page and so far?
I surprised with the analysis you made to
create this actual put up extraordinary. Fantastic process!
I'm curious to find out what blog platform you have been utilizing?
I'm experiencing some small security problems with my
latest blog and I'd like to find something more risk-free.
Do you have any recommendations?
When I initially left a comment I appear to
have clicked the -Notify me when new comments are added- checkbox and now whenever a comment
is added I receive 4 emails with the same comment. There has to be an easy method you
are able to remove me from that service? Appreciate
it!
Thank you for the auspicious writeup. It in fact
was a amusement account it. Look advanced to more added agreeable from you!
By the way, how can we communicate?
Does your blog have a contact page? I'm having a tough time
locating it but, I'd like to send you an e-mail.
I've got some suggestions for your blog you might be interested in hearing.
Either way, great blog and I look forward to seeing it improve over time.
You really make it appear really easy along with your
presentation but I in finding this topic to be really something which I feel I would never
understand. It kind of feels too complex and very huge for me.
I'm looking forward on your next post, I'll attempt to get the hang of it!
Actually no matter if someone doesn't know after that its up to other visitors that they will assist,
so here it occurs.
Nice blog here! Additionally your website a lot up fast!
What web host are you using? Can I get your associate hyperlink
on your host? I wish my web site loaded up as fast as yours lol
Yes! Finally someone writes about you.
Hey I know this is off topic but I was wondering if you knew of
any widgets I could add to my blog that automatically tweet my newest twitter updates.
I've been looking for a plug-in like this for quite some time and was hoping maybe you would have some experience with something like this.
Please let me know if you run into anything. I truly enjoy reading your blog
and I look forward to your new updates.
Thanks for another informative blog. The place else may just I
am getting that kind of information written in such a perfect
way? I've a project that I am simply now running on, and I have been at the glance out for such information.
You could definitely see your enthusiasm in the work you write.
The world hopes for even more passionate writers such as you who are not afraid to say how
they believe. All the time go after your heart.
If you wish for to improve your experience simply keep visiting this site and be
updated with the newest news update posted here.
Hey there! This is kind of off topic but I need some advice from an established blog.
Is it very hard to set up your own blog? I'm not very techincal but I can figure things out pretty quick.
I'm thinking about making my own but I'm not sure where to begin. Do you have any points or
suggestions? Thank you
Spot on with this write-up, I actually feel this site needs
far more attention. I'll probably be back again to read through more,
thanks for the information!
I was wondering if you ever thought of changing the layout of your site?
Its very well written; I love what youve got to say.
But maybe you could a little more in the way of content so people could connect with it better.
Youve got an awful lot of text for only having one or two images.
Maybe you could space it out better?
I'm not sure exactly why but this weblog is loading incredibly slow for me.
Is anyone else having this problem or is it a problem on my end?
I'll check back later on and see if the problem still exists.
Great delivery. Great arguments. Keep up the great work.
Hello this is kinda of off topic but I was wondering if blogs use WYSIWYG editors or
if you have to manually code with HTML. I'm starting a blog soon but have no coding knowledge so I wanted to get guidance from someone with experience.
Any help would be enormously appreciated!
At this moment I am ready to do my breakfast, once having my breakfast coming over again to read
more news.
I read this post completely on the topic of the difference of newest and preceding technologies, it's awesome
article.
Right here is the right website for anyone who wants to
find out about this topic. You know a whole lot its almost
tough to argue with you (not that I actually will need to…HaHa).
You certainly put a new spin on a subject which has been discussed for years.
Excellent stuff, just excellent!
Great post however I was wanting to know if you could write a litte more on this subject?
I'd be very grateful if you could elaborate a little bit
more. Appreciate it!
We're a group of volunteers and starting a new scheme in our community.
Your web site provided us with valuable
info to work on. You have done an impressive job and our entire community will
be thankful to you.
Hey there! Do you know if they make any plugins
to safeguard against hackers? I'm kinda paranoid about losing everything I've worked hard
on. Any recommendations?
This is a topic that is near to my heart...
Many thanks! Where are your contact details though?
These are in fact еnormous ideas in concerning blogging.
You have touched some pleasant things here. Any waү keep up wrinting.
Whаt's Going down i am new to this, I ѕtumbled uρon this I've discovered It absoluteⅼy useful and it has
aided me out loads. Ӏ'm hoping tо gіve a contribution & assiѕt otheг users like its aidеd me.
Gooԁ job.
Hello to every body, it's my first pay a quick visit of this blog; this weblog consists of
awesome and truly excellent material for visitors.
Hey I am so glad I found your site, I really found you by
mistake, while I was browsing on Google for something else,
Regardless I am here now and would just like to say many thanks
for a fantastic post and a all round enjoyable blog (I also love the theme/design), I don't have time to read through it all at
the moment but I have book-marked it and also included your RSS feeds, so when I have time I will be back to read a lot more, Please do keep up the
fantastic job.
Excellent pieces. Keep posting such kind of information on your page.
Im really impressed by your blog.
Hi there, You have performed a great job. I will certainly digg it and in my
opinion recommend to my friends. I'm confident they
will be benefited from this web site.
Hi there I am so thrilled I found your weblog, I really found you by mistake, while I was searching on Askjeeve
for something else, Regardless I am here now and would just like
to say kudos for a tremendous post and a all round entertaining blog (I also love the theme/design), I don’t
have time to go through it all at the moment but I have saved it
and also added in your RSS feeds, so when I have time I will be back to read much more, Please do keep up the fantastic work.
I know this if off topic but I'm looking into starting my own blog and was curious what all
is needed to get set up? I'm assuming having a blog like yours
would cost a pretty penny? I'm not very internet savvy so I'm not 100% positive.
Any suggestions or advice would be greatly appreciated.
Appreciate it
It's perfect time to make a few plans for the long run and it's time
to be happy. I've read this put up and if I could I wish to recommend you some fascinating
issues or suggestions. Perhaps you can write next articles relating to
this article. I desire to read even more things approximately it!
Thanks for the good writeup. It if truth be told used to be a enjoyment account it.
Look complicated to far delivered agreeable from you!
By the way, how can we be in contact?
If some one wishes to be updated with latest technologies after that
he must be visit this site and be up to date every day.
Hi there to every body, it's my first pay a quick visit of this web site; this web site includes amazing and
in fact excellent material in favor of visitors.
My brother recommended I might like this blog. He was totally
right. This post truly made my day. You can not imagine just how much
time I had spent for this information! Thanks!
I am in fact grateful to the owner of this site who has shared this great piece of writing at
at this place.
A person essentially lend a hand to make critically posts I would
state. That is the very first time I frequented your website page and to this point?
I surprised with the analysis you made to create this particular
submit incredible. Fantastic job!
Appreciating the dedication you put into your website and in depth information you provide.
It's good to come across a blog every once in a while that
isn't the same out of date rehashed information. Great read!
I've saved your site and I'm including your RSS feeds to my Google
account.
Fine way of telling, and good paragraph to obtain information on the topic of my presentation subject, which i am going to
convey in university.
Hi there, after reading this awesome paragraph i am as well cheerful to share my familiarity here wіth friends.
Hеllo! Quick quеѕtion that's entirely off topic. Ɗo
you know how to make your site mobile friendly? My website looks weird
when browsіng from my iphone 4. I'm trying to fіnd a theme or
plugin that might be able to correct this problem.
If you have any suggestions, please share.
With thankѕ!
This is ɑ topic which is near to my heart... Take care! Exactly ԝhere are your contaϲt details though?
Just want tо ѕay your articlе is as surprising. The clarity on your publish is just nice and i
could suⲣpose you're a professional in this subject.
Well wіth your permission let me to clutch your feed to
stay updated with imminent post. Thanks 1,000,000 and please continue the gratifying
work.
Very nicе post. I just stumЬled upon your weblog and wished to sаy
tһat I have truly enjoyed suгfing around your blog posts.
In any cɑse I'll be subscribing to your rss feed and I hope you
write again soon!
That is really interesting, You're an overly skilled blogger.
I've joined your feed and sit up for in search of
more of your excellent post. Also, I have shared your site in my social networks
Very quickly this web site will be famous amid all blog people, due to it's nice posts
Hi! I could have sworn I've been to this web site before but after going through many of the posts I realized it's new
to me. Regardless, I'm certainly happy I found it and I'll be bookmarking it and checking back frequently!
Hey there just wanted to give you a quick heads up and let you know a
few of the pictures aren't loading correctly.
I'm not sure why but I think its a linking issue.
I've tried it in two different internet browsers and both show the same
results.
hello there and thank you for your info – I have definitely
picked up anything new from right here. I did however
expertise several technical issues using
this web site, since I experienced to reload the website many times previous to I could get
it to load correctly. I had been wondering
if your web hosting is OK? Not that I am complaining, but sluggish loading
instances times will very frequently affect your placement in google and can damage your high quality
score if advertising and marketing with Adwords.
Anyway I'm adding this RSS to my e-mail and could look
out for a lot more of your respective exciting content.
Make sure you update this again soon.
hello there and thank you for your info – I have certainly picked up something new from
right here. I did however expertise a few technical issues using this site,
since I experienced to reload the web site a lot of times previous
to I could get it to load correctly. I had been wondering if your hosting is OK?
Not that I'm complaining, but slow loading instances times
will often affect your placement in google and could damage your high quality score if ads and marketing with Adwords.
Well I'm adding this RSS to my email and can look out
for much more of your respective fascinating content. Ensure that you update this
again soon.
Hey excellent website! Does running a blog such as this take a large amount of
work? I have very little expertise in computer programming however I had been hoping to start my own blog
in the near future. Anyway, if you have any ideas
or tips for new blog owners please share. I know this
is off subject nevertheless I just wanted to ask.
Thank you!
Hey there! I simply would like to give you a huge thumbs
up for the great info you've got right here on this post.
I am coming back to your web site for more soon.
It's a shame you don't have a donate button! I'd definitely donate to this fantastic blog!
I guess for now i'll settle for bookmarking and adding your
RSS feed to my Google account. I look forward to new updates and
will talk about this blog with my Facebook group.
Chat soon!
Hi to all, the contents existing at this site are actually amazing for people knowledge,
well, keep up the good work fellows.
Hey, I think your website might be having browser compatibility issues.
When I look at your blog site in Ie, it looks fine
but when opening in Internet Explorer, it has some
overlapping. I just wanted to give you a quick heads up!
Other then that, amazing blog!
I was wondering if you ever considered changing the layout
of your site? Its very well written; I love what youve got to say.
But maybe you could a little more in the way of content so people
could connect with it better. Youve got an awful lot of text for
only having one or two pictures. Maybe you could space it
out better?
Hi there! This is my 1st comment here so I just wanted to give a quick shout out and say I really enjoy reading your blog posts.
Can you recommend any other blogs/websites/forums that deal with the same subjects?
Thanks a lot!
Hello! Quick question that's totally off topic. Do you know how
to make your site mobile friendly? My web site looks weird when viewing from my apple iphone.
I'm trying to find a theme or plugin that might be able
to correct this issue. If you have any recommendations,
please share. Thanks!
Wonderful blog! I found it while searching on Yahoo News.
Do you have any suggestions on how to get listed in Yahoo News?
I've been trying for a while but I never seem to get
there! Appreciate it
Does your website have a contact page? I'm having trouble
locating it but, I'd like to shoot you an e-mail. I've got some creative ideas for your blog you
might be interested in hearing. Either way, great blog and I look forward to seeing it improve over time.
I'm very happy to find this web site. I wanted to thank you for ones time for this wonderful read!!
I definitely loved every bit of it and i also have
you saved to fav to check out new stuff in your web site.
It's enormous that you are getting ideas from this article as well as from our discussion made at this time.
I every time used to study piece of writing in news papers but now as
I am a user of internet therefore from now I am using net for posts, thanks to web.
bookmarked!!, I love your website!
Hello, after reading this remarkable paragraph i am too delighted to share my knowledge
here with friends.
I know this if off topic but I'm looking into starting
my own blog and was wondering what all is needed to get
setup? I'm assuming having a blog like yours would cost a pretty
penny? I'm not very internet savvy so I'm not 100% certain. Any recommendations or advice would be greatly appreciated.
Appreciate it
I visit everyday a few websites and blogs to read articles, except this webpage presents
quality based articles.
Remarkable! Its actually remarkable post,
I have got much clear idea about from this article.
I every time used to study paragraph in news papers but now as I am a user of
internet thus from now I am using net for articles, thanks to
web.
It's nearly impossible to find knowledgeable people for
this subject, but you seem like you know what you're talking about!
Thanks
Heya i am for the first time here. I found this board and I find It truly useful & it helped
me out much. I hope to give something back and aid others like you aided me.
Hello, I enjoy reading all of your article.
I wanted to write a little comment to support you.
Excellent way of describing, and good post to get data
about my presentation topic, which i am going to convey in university.
Your style is really unique in comparison to
other people I've read stuff from. I appreciate you for
posting when you've got the opportunity, Guess I'll just bookmark this site.
I always used to read article in news papers but now as I am a
user of web thus from now I am using net for articles
or reviews, thanks to web.
I visited many web sites except the audio quality for audio songs present at this
web site is in fact fabulous.
Τhіs post will assist the internet users for creating new website or even a bloց from start to end.
Rіght here is the perfect blog for anyone who wishes to find out about this
topic. You know a whole lot its almost tough to argue with you (not that I actually wօᥙld want to…HaHa).
You certainly put a brand new spіn on a topic that hаs Ьeen discusseⅾ for
a long time. Wonderful stuff, just great!
Ꮐreetings! Very useful advice within this post!
It is the little changes that produce tһe moѕt signifiϲant ⅽhanges.
Thanks a lot fօr sharing!
I’m not that much of ɑ online readeг to be honest but
your sites really nice, keep it up! I'll go ahead
аnd bookmark yoᥙr website to come back later. All the Ьest
Appreciate the recommendation. Let me try it out.
Right here is the right blog for anybody who really wants to
find out about this topic. You understand a whole lot its almost hard to argue with you (not that I
personally will need to…HaHa). You certainly put a fresh
spin on a subject which has been written about for years.
Wonderful stuff, just wonderful!
bicikli bolt kdnp A fat bike kerékpárok első
látásra sok embert megdöbbentenek. Maga a váz olyan mint egy hagyományos MTB váz, de természetesen szélesebb.
A legérdekesebb alkatrész a kerékpáron természetesen a kerék, a gumi.
Ezek általában kétszer olyan szélesek mint egy hagyományos felni, viszont, hogy könnyítsék a súlyát
a közepét kimarják. A lényege ezeknek a kerékpároknak, hogy
a széles gumi kevésbé süllyed laza talajon, homokon, vagy hóban, illetve sárban is jól lehet vele haladni.
Wow, awesome blog layout! How long have you been blogging for?
you make blogging look easy. The overall look of your website
is great, let alone the content!
What's up to all, for the reason that I am truly keen of reading this web site's post to be updated regularly.
It carries nice stuff.
https://marionsrezepte.com/index.ph... Contrary to Rytr Review https://wiki.wardepartmentpapers.or... In Rytr Review http://wiki.antares.community/index... Rytr
Review With
https://datacesspro.com/shriharifou... In between Rytr Review https://aguawiki.com/index.php/Usin... In face of Rytr Review https://www.labprotocolwiki.org/ind... Rytr Review Close to
https://yoga.wiki/index.php?title=U... Rytr Review For https://wiki.sports-5.ch/index.php?... Near Rytr Review https://successionwiki.co.uk/index.... Before Rytr
Review
https://isotrope.cloud/index.php/By...
https://zodipedia.com/index.php/5_W... Rytr Review Without https://successionwiki.co.uk/index.... Rytr Review Following https://wiki.fantasymoduleparser.te... Rytr Review Including
https://sacswiki.com/index.php/How_... Rytr Review As
well as https://donnjer.de/wiki/index.php/H... Rytr Review On http://cifarelli.net/mediawiki/inde... Amid
Rytr Review
https://taupi.org/index.php?title=U... Despite Rytr Review https://www.offwiki.org/wiki/Remark... Apart from Rytr Review https://minecrafting.co.uk/wiki/ind... Instead of Rytr Review
http://diktyocene.com/index.php/Use...
http://kackle.com.au/mediawiki/inde... Rytr Review On top of https://braneac.co.za/community/pro... Rytr Review Except https://historiamachina.com/index.p... Near to Rytr
Review
https://pgttp.com/wiki/Five_New_Def... Saving Rytr Review
https://wiki.melimed.eu/index.php?t... Prior to Rytr Review https://wiki.bioprovement.com/index... Rytr Review Within
https://www.kst-serviceportal.de/wi... Rytr Review In addition to https://zodipedia.com/index.php/Use... Atop Rytr Review https://wiki.wardepartmentpapers.or... Rytr
Review Up
https://pianopracticewiki.com/index...
Great article! That is the kind of information that are supposed to be shared
around the web. Shame on Google for no longer positioning this put up higher!
Come on over and talk over with my website . Thank you =)
http://medic.zkgmu.kz/?option=com_k...
http://artisticpisceshk.com/forum/p...
http://www.andreagorini.it/SalaProf...
https://binary.org.br/forum..../pro...
https://sl.ganudenu.net/community/p...
https://datacesspro.com/shriharifou...
Link exchange is nothing else except it is just placing the other person's webpage link on your page at appropriate place and other person will also do similar in support of you.
http://everydayfam.com/lillalapham2...
https://proweb-hr.com/test/index.ph...
https://thetruefountainofyouth.com/...
http://fotoclubbahia.com.ar/communi...
https://desacelerados.com.br/commun...
http://everydayfam.com/lillalapham2...
Thanks for the marvelous posting! I certainly enjoyed reading it, you will be a great author.I
will make sure to bookmark your blog and may come back down the road.
I want to encourage continue your great posts, have a nice holiday weekend!
Hi! I know this is somewhat off topic but I was wondering which blog platform are you using for this website?
I'm getting sick and tired of Wordpress because I've had issues with hackers and I'm looking at alternatives for
another platform. I would be fantastic if you could point me in the direction of
a good platform.
http://ontarioinvestigatortraining....
http://fotoclubbahia.com.ar/communi...
https://training.compatiblecare.com...
https://www.cynergos.com/?option=co...
https://pendantquetulaimes.com/foru...
http://estudiaencasa.org.es/?option...
Thank you for sharing your info. I truly appreciate your efforts and
I will be waiting for your next write ups thank
you once again.
https://wakjokocali.com/forum/profi...
http://csajosbuli.horimedia.com/com...
http://fotoclubbahia.com.ar/communi...
http://www.daghmiagri.com/index.php...
https://www.islandcrowd.com/forums/...
https://igcc.com.pe/aulavirtual/blo...
Hi there, yeah this post is really pleasant and I have learned lot of things from it concerning blogging.
thanks.
http://csajosbuli.horimedia.com/com...
http://rollshutterusa.com/?option=c...
https://datacesspro.com/shriharifou...
https://csc.ucad.sn/?option=com_k2&...
https://crossbowconsulting.co.ke/in...
https://careked.com/community/profi...
https://wiki.tegalkota.go.id/index.... Florida Public Adjuster During https://medea.medianet.cs.kent.edu/... Beside
Florida Public Adjuster http://www.xxx_www.itguyclaude.com/... Florida Public Adjuster in case of
https://www.vander-horst.nl/wiki/Ho... Florida Public Adjuster Including https://wiki.tairaserver.net/index.... Florida Public Adjuster Above https://telearchaeology.org/TAWiki/... Outside Florida Public Adjuster
http://cifarelli.net/mediawiki/inde... Florida Public Adjuster In between https://medea.medianet.cs.kent.edu/... Florida Public Adjuster Pending
http://diktyocene.com/index.php/Cho... Florida Public Adjuster
As to
http://lopezclean.com/yclas/full-ti...
I constantly spent my half an hour to read this weblog's content everyday along with a
cup of coffee.
Еxcellent post! We are linking to this particularly great content on our site.
Keеp up the good writing.
I'd ⅼіkе to find out morе? I'd like to find out more details.
Tһis article wіll help the internet people for creating new blog or even a weblog from start to end.
Нi there, just became alert t᧐ your blog throuցh Gߋogle,
ɑnd found tһat it is truly informative. I'm gonna watch out for brussels.
I ᴡill be grateful if you continue thіs in future.
A lot of people will be benefited from yoᥙr writing.
Cheers!
Great ɡοods from you, man. I've understand y᧐ur stuff preѵiouѕ to and
you are just too great. I actually like ԝhat you have acquired here,
certainly like what you are saying and the way in ᴡhich yoᥙ say it.
You make it entertaining and you stіll take care of to keep it wise.
I can't wait to read far more from yⲟu. Τhis is really a wonderful sitе.
Іt's a shame you don't have a donate button! I'd most
certainlу donate to this outѕtanding bⅼog!
I suррose for now i'll settle for book-mаrking and adding your
RSS feed to my Gooցle account. I look forԝard
to brand neԝ updates and will talk about this ᴡebsite with mү Facebook group.
Ꮯhat ѕoоn!
Magnifіcent Ьeat ! I wish to apprentice whilst you amend your web site,
how could i subsⅽгibe for а blog web site?
The account aided mе a applicable deal. I had been a ⅼittⅼe bit familіar of
thіs your Ьroadcast offered shіny transparent concеpt
antivert 25 mg price https://meclizine.top/
Thanks for the good writeup. It in truth was once a
entertainment account it. Glance advanced to far delivered agreeable from you!
However, how could we keep up a correspondence?
This is the perfect webpage for anybody who really wants
to find out about this topic. You understand a whole lot its almost tough to argue with you (not that I personally will need to…HaHa).
You certainly put a new spin on a subject which has been written about for ages.
Excellent stuff, just great!
What's Going down i am new to this, I stumbled upon this I've found It absolutely useful and it has aided me out loads.
I hope to give a contribution & assist other customers like its aided
me. Great job.
Pretty nice post. I simply stumbled upon your weblog and wanted to mention that I've
truly enjoyed surfing around your blog posts. In any case I'll
be subscribing to your feed and I'm hoping you write again very soon!
I always emailed this weblog post page to all my associates, since if like to read it then my contacts will
too.
I will right away grab your rss as I can't in finding your email subscription link or e-newsletter service.
Do you have any? Please permit me realize in order that I may just subscribe.
Thanks.
Does your blog have a contact page? I'm having trouble locating it but,
I'd like to send you an email. I've got some
creative ideas for your blog you might be interested in hearing.
Either way, great website and I look forward to seeing it develop over time.
I know this website presents quality depending content and additional stuff, is there
any other web page which provides such stuff in quality?
You actually make it seem really easy together
with your presentation however I in finding this topic to be really something that I think I'd by no means understand.
It sort of feels too complicated and very wide for me. I'm
looking ahead in your subsequent post, I will try to get the grasp of it!
I've been exploring for a little bit for any high quality articles or
weblog posts on this kind of area . Exploring in Yahoo I at last stumbled upon this site.
Reading this info So i'm happy to express that I have a
very just right uncanny feeling I discovered exactly what I needed.
I so much surely will make certain to do not overlook this
web site and provides it a look regularly.
Thankfulness to my father who stated to me concerning this webpage, this web site is really remarkable.
Hi there this is somewhat of off topic but I was wondering if blogs use WYSIWYG editors or if you have to manually code with HTML.
I'm starting a blog soon but have no coding knowledge so I wanted to get guidance from someone with experience.
Any help would be enormously appreciated!
I am not certain the place you're getting
your information, however great topic. I must spend some time learning more
or working out more. Thank you for great info I was
searching for this info for my mission.
Post writing is also a fun, if you know after that you can write if not it is complex to write.
buy generic meclizine online canada antivert price buy meclizine from uk
Excellent beat ! I would like to apprentice at the
same time as you amend your website, how can i subscribe for a blog site?
The account aided me a applicable deal. I had been tiny bit acquainted of this your broadcast offered shiny transparent idea
Hello there! I know this is kinda off topic but I'd figured I'd ask.
Would you be interested in exchanging links or maybe guest
writing a blog post or vice-versa? My website covers a lot
of the same subjects as yours and I believe we could greatly benefit from each
other. If you might be interested feel free
to shoot me an email. I look forward to hearing from
you! Fantastic blog by the way!
Fantastic web site. A lot of useful info here. I am sending it to a few pals ans additionally sharing in delicious.
And obviously, thanks to your sweat!
I've been surfing online more than 2 hours today, yet I never found any
interesting article like yours. It is pretty worth enough for
me. Personally, if all web owners and bloggers made good content as you
did, the internet will be a lot more useful than ever before.
Hi there, I found your site via Google whilst looking for a comparable matter, your web site came up, it seems to be good.
I've bookmarked it in my google bookmarks.
Hello there, simply became alert to your weblog via Google, and located that it is truly
informative. I am going to be careful for brussels. I'll be
grateful should you continue this in future. Lots of folks will
likely be benefited from your writing. Cheers!
Wow, that's what I was exploring for, what a data! existing here at this blog, thanks admin of this
website.
Heya! I'm at work surfing around your blog from my new
apple iphone! Just wanted to say I love reading through your blog and look forward to all your posts!
Keep up the excellent work!
Saved as a favorite, I really like your site!
If you wish for to grow your know-how only keep visiting this web
site and be updated with the most recent information posted
here.
Hi there to every single one, it's truly a fastidious for me to pay a quick visit this website,
it consists of precious Information.
This is really attention-grabbing, You're an overly professional
blogger. I have joined your rss feed and stay up for searching for
extra of your great post. Additionally, I have shared your site in my social networks
معمولا سر آستین و قسمت پایینی این لباس کشبافت است تا
از نفوذ سرما به داخل آن جلوگیری شود.
هودی پنبه ای ریک و مورتی از
برند پول اند بیر، این هودی پرینت دار با جیب کیسه
ای در جلو بسیار زیبا و با دوام میباشد.
همچنین اگر می خواهید از ماشین لباسشویی استفاده کنید سعی کنید آن ها را از لباس های دیگر
جدا کنید و به با دور کند بشورید.
رویهی داخی این هودی زنانه نیز پنبه
است که باعث میشود با پوشیدن آن حس
نرم و لطیفی منتقل شود.
What's Happening i am new to this, I stumbled upon this I have found It absolutely useful and it has aided me out loads.
I am hoping to give a contribution & aid different users like its aided me.
Good job.
buy hcq tablets hydroxychloroquine for sale buy plaquenil generic online
Thanks for sharing your thoughts about payang-pp.
Regards
Тhanks designed for sharіng sucһ a pleasant օpіnion,
pіece of writing is good, thаts why i have read it fully
I love your blog.. very nice colorѕ & theme. Did you design thiѕ
website yourself or did yoս hire somеone to dо it for you?
Plz answer back as I'm looking to design my own blog
and would like to find oսt wheгe u got this from.
cheers
Definitely believe that which you said. Your favorite reason appeared to be on the net the
simplest thing to be aware of. I say to you, I certainly
get irked while people consider worries that they plainly do not know about.
You managed to hit the nail upon the top as well as defined
out the whole thing without having side effect ,
people can take a signal. Will probably be back to get more.
Thanks
Hello, i read your blog occasionally and i own a similar one and i was just curious
if you get a lot of spam feedback? If so how do you stop it, any plugin or anything you
can recommend? I get so much lately it's driving me crazy so any
support is very much appreciated.
Hi, Neat post. There's a problem with your web site in web
explorer, could check this? IE nonetheless is the marketplace
leader and a good portion of folks will miss your great writing because of
this problem.
New site 2024 New site 2024 New site 2024 New Site 2024 http://socionika-eniostyle.ru/gaaas... New site 2024
New site 2024
Hi thеre, I read your new stuff daily.
Your hᥙmoristiϲ style is witty, keep up the good
work!
I'm not ѕure exactly why but this site is loading incredibly slow for me.
Is anyone else having this isѕue or is it a issue on my end?
I'll check back later and see if the problem still exists.
Your way of explaining all in this paragraph is actually good,
every one can without difficulty understand it, Thanks a lot.
It's hard to come by experienced people on this subject, but
you sound like you know what you're talking about!
Thanks
Heya i'm for the first time here. I came across this board and I find It truly useful & it helped
me out much. I hope to give something back and aid others like
you aided me.
Hello my loved one! I want to say that this article
is awesome, nice written and include almost all important infos.
I would like to look more posts like this .
Link exchange is nothing else except it is only placing the other person's website
link on your page at appropriate place and other person will also do
same for you.
Please let me know if you're looking for a writer for your blog.
You have some really good articles and I feel I would be a good asset.
If you ever want to take some of the load off, I'd really
like to write some articles for your blog in exchange for a link back to mine.
Please shoot me an email if interested. Thanks!
Hi there! I could have sworn I've been to this
website before but after browsing through some of the post
I realized it's new to me. Anyways, I'm definitely delighted I
found it and I'll be book-marking and checking back often!
Howdy I am so delighted I found your webpage, I really found you by error, while I was looking on Google for something else, Regardless
I am here now and would just like to say many thanks for
a marvelous post and a all round exciting blog (I also
love the theme/design), I don’t have time to browse it all at
the minute but I have bookmarked it and also added in your RSS
feeds, so when I have time I will be back to read a great deal more, Please do keep up
the great jo.
Thanks , I've recently been searching for info about this subject for ages and yours is the best I've discovered so far.
But, what about the bottom line? Are you positive about the source?
İzmir Travesti Reklam Portalı
İzmir Travesti sayfası. Bu sayfada şehir’deki en elit trans bireylere ulaşabilir,
fotoğraf, video ve iletişim bilgilerine sahip olabilirsiniz.
izmir travesti İzmir Travesti Reklam Platformu
en güzel izmir travesti kızlarına ulaş.
What's up to all, how is the whole thing, I think every one
is getting more from this website, and your views are good in favor of new visitors.
always i used to read smaller articles which as well clear
their motive, and that is also happening with this paragraph
which I am reading at this time.
Great delivery. Outstanding arguments. Keep up the great spirit.
I am in fact happy to glance at this weblog posts which contains tons
of helpful facts, thanks for providing such statistics.
As the admin of this website is working, no uncertainty very soon it will be renowned, due to its quality contents.
If you are going for best contents like I do, only pay a visit this website
every day because it presents quality contents, thanks
I just like the helpful info you provide on your articles.
I will bookmark your blog and test once more right here frequently.
I'm reasonably sure I will learn plenty of new stuff
right right here! Good luck for the following!
Greetings! Very useful advice within this post! It is the little changes that produce the most important changes.
Many thanks for sharing!
Hi would you mind sharing which blog platform you're working with?
I'm going to start my own blog in the near future but I'm having a tough time making a decision between BlogEngine/Wordpress/B2evolution and Drupal.
The reason I ask is because your layout seems different
then most blogs and I'm looking for something unique.
P.S Apologies for being off-topic but I had to ask!
Hello to all, the contents present at this web site are in fact remarkable for people experience, well, keep
up the nice work fellows.
You ccan defіnitely see your expertise ᴡithin the
work you write. The arena hopes foor mօrе passionate writers likе yoᥙ wһo
are noot afrzid tо mention hоѡ tһey belieѵe. Always ffollow үօur heart.
Hello! Would you mind if I share your blog with my facebook group?
There's a lot of folks that I think would really appreciate your content.
Please let me know. Cheers
It's very straightforward to find out any matter on web as compared to books, as I found this piece of
writing at this web page.
Thanks for sharing your thoughts about Angka Keramat.
Regards
whoah this weblog is fantastic i like studying your articles.
Stay up the good work! You already know, a lot of persons
are hunting around for this information, you could help them greatly.
Incredible points. Sound arguments. Keep up the great effort.
You really make it seem so easy with your presentation but I find this matter to be actually something that I think I would never understand.
It seems too complex and very broad for me.
I'm looking forward for your next post, I will try to get the hang of it!
Great info. Lucky me I came across your blog by accident
(stumbleupon). I have book marked it for later!
It's a pity you don't have a donate button! I'd without a doubt donate to
this outstanding blog! I guess for now i'll settle for bookmarking and adding your
RSS feed to my Google account. I look forward to
fresh updates and will talk about this website with my Facebook
group. Talk soon!
My brother recommended I might like this blog. He was entirely right.
This post actually made my day. You can not imagine
simply how much time I had spent for this information! Thanks!
Hello there! Do you know if they make any plugins to assist with SEO?
I'm trying to get my blog to rank for some targeted keywords but I'm not seeing very good results.
If you know of any please share. Thanks!
If you are going for most excellent contents like myself, only pay a
quick visit this site everyday since it offers quality contents, thanks
Yes! Finally something about Paito Sdy.
penis enlargement
This blog was... how do I say it? Relevant!!
Finally I have found something which helped me. Cheers!
It's perfect time to make a few plans for the long run and it's time to be happy.
I've learn this publish and if I could I wish to recommend you few
attention-grabbing issues or advice. Perhaps you could write subsequent
articles relating to this article. I desire to read more things approximately it!
I absolutely love your blog and find many of your post's to be exactly what I'm looking for.
Would you offer guest writers to write content for yourself?
I wouldn't mind creating a post or elaborating on a number of the
subjects you write related to here. Again, awesome weblog!
Yes! Finally someone writes about Source.
Sevens Legal Criminal Lawyers, located in Southern California, is renowned as a top-tier criminal defense
firm. Led by Samantha Greene, a Certified Criminal Law Specialist, this firm brings decades of combined experience in the field
of criminal law.
One of the key reasons why Sevens Legal is seen as the best in San Diego
is because of Samantha Greene's certification as a Criminal Law Specialist by the California
State Bar. This certification guarantees that clients are
provided with exceptional legal representation.
Furthermore, the firm’s specialized method of leveraging insights from ex-prosecutors with its defense strategies offers clients an unparalleled advantage in dealing with their cases.
Comprehending the entirety of a client’s rights and effective tactics
for success is an area of expertise of Sevens Legal.
This team of legal experts work tirelessly to make sure
that the impact of charges is minimized or dismissed.
Operating in numerous communities in San Diego, including Alta Vista, Alvarado
Estates, and Birdland, they shows an unwavering commitment to local residents.
To sum up, Sevens Legal's combination of knowledge, legal
acumen, and dedication to clients positions them as an unbeatable option for anyone seeking legal defense in San Diego.
Do you have any video of that? I'd want to find out more details.
Sweet blog! I found it while surfing around on Yahoo News.
Do you have any tips on how to get listed in Yahoo News?
I've been trying for a while but I never seem to get
there! Cheers
A person essentially lend a hand to make significantly posts I might state.
This is the very first time I frequented your website page and to this point?
I surprised with the analysis you made to create this actual post amazing.
Great process!
Hi my family member! I wish to say that this post is awesome, great written and
include almost all significant infos. I would like to look extra
posts like this .
It is appropriate time to make some plans for the future and it's time to be happy.
I've read this post and if I could I want to suggest you
few interesting things or suggestions. Perhaps you could write next articles referring to this article.
I wish to read even more things about it!
bookmarked!!, I really like your blog!
Hi there, You have done an excellent job. I'll definitely digg it and personally recommend to my friends.
I am confident they'll be benefited from this website.
Ahaa, its pleasant discussion regarding this article here at this web site,
I have read all that, so now me also commenting here.
چادر کله گاوی
You ought to take part in a contest for one of the
greatest blogs on the net. I will highly recommend this site!
I blog frequently and I truly thank you for your information. Your article has really peaked
my interest. I'm going to book mark your blog and keep
checking for new details about once per week. I subscribed to your RSS feed as
well.
I think everything published wass actually very logical.
However, think on this, suppose you wrote a catchier post
title? I mean, I don't want to tell you how tto run your blog, but supposde
you added a title that grabbed a person's attention? I mean Un firmware pour Reprap: Marlin - Blogelectro is kinda plain. You could glance at Yahoo's front
paye aand note how they create news titles to grab viewers to open tthe links.
You mighjt addd a video or a related picture or two tto grab readers interested
about what you've got to say. In my opinion, it would make your blpg a little bit more interesting.
Thank you for sharing your info. I really appreciate your efforts and I will be waiting for your further
write ups thanks once again.
Hi would you mind letting me know which webhost you're
working with? I've loaded your blog in 3 different web browsers and
I must say this blog loads a lot faster then most.
Can you suggest a good internet hosting provider at a reasonable price?
Many thanks, I appreciate it!
Hello there! This is my first visit to your blog! We are
a collection of volunteers and starting a new project in a community in the same niche.
Your blog provided us beneficial information to work
on. You have done a extraordinary job!
Hello There. I found your blog the usage of msn. This is a
very smartly written article. I will be sure to bookmark it and return to
read extra of your helpful information. Thank you
for the post. I will definitely comeback.
Hello, Neat post. There's a problem along with your web site in internet explorer, may check this?
IE still is the market leader and a huge component of other folks will omit your great writing
because of this problem.
I think this is among the so much important info for me.
And i am glad reading your article. But want to remark on some general things, The web site taste is wonderful, the articles is truly nice : D.
Good job, cheers
If some one needs to be updated with most recent technologies after
that he must be pay a quick visit this site and be up to date every day.
Hello to every body, it's my first go to see of this weblog; this website contains awesome and really
good material for visitors.
Hey there exceptional website! Does running a blog similar to this take a large amount of work?
I've very little understanding of computer programming however I had been hoping to start
my own blog in the near future. Anyway, should you have any suggestions or
techniques for new blog owners please share. I know this is off subject but I just wanted to ask.
Kudos!
Hello, i think that i saw you visited my web site so i
came to “return the favor”.I'm trying to find things
to improve my web site!I suppose its ok to use some of your
ideas!!
What's up, just wanted to say, I loved this blog
post. It was funny. Keep on posting!
Whoa! This blog looks exactly like my old one! It's on a completely different topic but
it has pretty much the same layout and design. Great choice
of colors!
Excellent post. I definitely love this site. Stick with it!
If you would like to improve your familiarity only keep visiting this web site and be updated
with the hottest information posted here.
payday loan
I am sure this paragraph has touched all the internet viewers, its really really good paragraph on building up new webpage.
Hello there, You have done an excellent job.
I will definitely digg it and personally recommend to my friends.
I am confident they will be benefited from this site.สล็อตออนไลน์
PG
When someone writes an paragraph he/she keeps the idea of a user in his/her mind that how a user can understand it.
So that's why this paragraph is great. Thanks!
Attractive section of content. I just stumbled upon your website and
in accession capital to assert that I acquire in fact enjoyed account your
blog posts. Any way I will be subscribing to your augment and even I achievement you access consistently fast.
Hey! Do you know if they make any plugins to help with SEO?
I'm trying to get my blog to rank for some targeted keywords but
I'm not seeing very good success. If you know
of any please share. Many thanks!
I аll tһe time emailed thos web site post
ρage to all my friends, because іf ⅼike to гead it then my contacts ѡill tߋo.
Superb post but I was wanting to know if you could write a litte more on this subject?
I'd be very grateful if you could elaborate a little bit more.
Kudos!
Hello Dear, are you genuinely visiting this site on a regular basis, if so then you will without doubt
take fastidious knowledge.
Thanks in support of sharing such a pleasant opinion, piece of writing is fastidious, thats why i have read it fullyแทงบอลเต็ง88
You made some decent points there. I looked on the internet to learn more about the issue and found most individuals will go along
with your views on this web site.
I am sure this piece of writing has touched all the internet people, its really really
pleasant article on building up new web site.
I enjoy what you guys tend to be up too. Such clever work and
exposure! Keep up the good works guys I've incorporated you guys
to our blogroll.
Hello! I just wanted to ask if you ever have any problems with hackers?
My last blog (wordpress) was hacked and I ended up losing months of hard work due
to no back up. Do you have any methods to protect against hackers?
Incredible points. Sound arguments. Keep up the great effort.
Very nice blog post. I certainly appreciate this site.
Continue the good work!
My brother suggested I might like this blog.
He was totally right. This post truly made my day. You cann't imagine simply how much
time I had spent for this info! Thanks!
I don't even know how I ended up here, but I thought this post was great.
I don't know who you are but certainly you are going to a famous blogger if you aren't already Cheers!
Cheers!
Good day! Do you know if they make any plugins to assist
with SEO? I'm trying to get my blog to rank for some targeted keywords
but I'm not seeing very good results. If you know of any please share.
Kudos!
I do accept as true with all of the concepts you have introduced to your post.
They're very convincing and will definitely work. Still, the posts are very quick for starters.
May just you please lengthen them a bit from subsequent time?
Thank you for the post.
Hi everybody, here every one is sharing these know-how,
therefore it's pleasant to read this blog, and I used to visit this blog every day.
Excellent blog here! Also your web site loads up fast!
What host are you using? Can I get your affiliate link to your host?
I wish my site loaded up as fast as yours lol
Hi to every single one, it's in fact a pleasant
for me to pay a visit this web page, it consists of helpful Information.
I love your blog.. very nice colors & theme. Did you make this website yourself
or did you hire someone to do it for you? Plz answer back as I'm looking to construct
my own blog and would like to know where u got this from.
thanks
Why visitors still make use of to read news papers when in this
technological world the whole thing is accessible
on net?
Great blog here! Also your website loads up fast! What web host are you using?
Can I get your affiliate link to your host? I wish my website loaded up as quickly as yours lol
Pretty nice post. I just stumbled upon your blog and wanted to say that I've
truly enjoyed surfing around your blog posts.
After all I'll be subscribing to your feed and I hope you write again soon!
Thanks to my father who stated to me about this website, this
webpage is genuinely awesome.
You actually make it seem really easy together with your presentation however I in finding this topic to be
really one thing which I feel I would never understand.
It seems too complicated and extremely extensive for me. I am taking a look ahead on your subsequent put up, I'll attempt to get the cling of it!
Magnificent website. A lot of helpful information here.
I am sending it to several buddies ans additionally sharing in delicious.
And obviously, thanks on your sweat!
Hi! I've been following your website for some time now
and finally got the courage to go ahead and give you a shout out
from Lubbock Tx! Just wanted to mention keep up
the good job!
Howdy! Someone in my Myspace group shared this website with us so I
came to take a look. I'm definitely enjoying the
information. I'm book-marking and will be tweeting this
to my followers! Exceptional blog and excellent design and
style.
I really like your blog.. very nice colors & theme. Did
you create this website yourself or did you hire someone to
do it for you? Plz reply as I'm looking to create my own blog and would like to find out where u got this from.
cheers
It's very trouble-free to find out any matter on net as compared to
textbooks, as I found this paragraph at this web site.
Appreciate the recommendation. Will try it out.
Hello There. I found your blog the usage of msn. That is
a really neatly written article. I will make sure to
bookmark it and return to read more of your helpful information.
Thanks for the post. I'll definitely comeback.
I have learn a few excellent stuff here. Definitely price bookmarking for revisiting.
I wonder how a lot effort you put to create this sort of fantastic informative site.
When someone writes an article he/she maintains the
plan of a user in his/her brain that how a user can understand it.
Therefore that's why this post is outstdanding. Thanks!
payday loan
These are truly wonderful ideas in about blogging.
You have touched some pleasant things here. Any way keep
up wrinting.
My relatives all the time say that I am killing my time here at net, but I
know I am getting know-how every day by reading
such good posts.
watch porn video
Hey! This is kind of off topic but I need some guidance from an established blog.
Is it tough to set up your own blog? I'm not very techincal but I can figure things out pretty fast.
I'm thinking about making my own but I'm not sure where to begin.
Do you have any tips or suggestions? Thank you
Amazing things here. I'm very satisfied to peer your article.
Thanks a lot and I'm having a look forward to touch you. Will
you please drop me a mail?
Write more, thats all I have to say. Literally, it seems as though you relied on the video to
make your point. You clearly know what youre talking
about, why waste your intelligence on just posting videos to your blog when you could be
giving us something enlightening to read?
I think this is among the most important info for me.
And i am glad reading your article. But should remark on few
general things, The website style is wonderful, the articles is really great :
D. Good job, cheers
What's up to all, how is everything, I think every one is getting more from
this site, and your views are fastidious designed for new users.
No matter if some one searches for his vital thing, thus he/she wishes
to be available that in detail, thus that thing is maintained over here.
Thank you for the good writeup. It in fact was a leisure
account it. Look advanced to far brought agreeable from you!
By the way, how can we communicate?
Today, I went to the beach with my children. I found a sea shell and gave it to my 4 year old daughter and said "You can hear the ocean if you put this to your ear." She put the
shell to her ear and screamed. There was a hermit crab inside and it
pinched her ear. She never wants to go back! LoL I know this is totally off topic but I had to tell someone!
I'm not sure where you are getting your information, but good topic.
I needs to spend some time learning more or understanding more.
Thanks for wonderful info I was looking for this information for my mission.
Fastidious answers in return of this matter
with genuine arguments and telling the whole thing about that.
Greetings! Very helpful advice within this post! It's the little
changes that produce the most important changes. Thanks a lot for sharing!
Hi, of course this paragraph is in fact good and I have learned
lot of things from it regarding blogging. thanks.
I'm gone to tell my little brother, that he should also visit this website on regular basis
to obtain updated from hottest gossip.
Currently it looks like BlogEngine is the top blogging platform out there right now.
(from what I've read) Is that what you are using on your blog?
Actually when someone doesn't bbe aware of afterward its up to other people that they will
help, so here it takes place.
penis enlargement
Fantastic website you have here but I was curious about
if you knew of any user discussion forums that cover the same topics talked about in this
article? I'd really love to be a part of community where I can get feedback from other knowledgeable people that share
the same interest. If you have any recommendations, please let me
know. Cheers!
You could certainly see your enthusiasm within the work you write.
The sector hopes for even more passionate writers like you who aren't afraid
to say how they believe. All the time follow your heart.
Hmm is anyone else having problems with the pictures on this blog loading?
I'm trying to figure out if its a problem on my end or if it's the
blog. Any feedback would be greatly appreciated.
What's up, yup this article is really good and I have
learned lot of things from it regarding blogging.
thanks.
Wow, wonderful blog layout! How lengthy have you ever been running a
blog for? you made blogging look easy. The total look of your website is fantastic, let alone the content!
I'm not sure where you're getting your info, but good topic.
I needs to spend some time learning more or understanding
more. Thanks for fantastic info I was looking for this info for my mission.
Pretty nice post. I just stumbled upon your weblog and
wanted to say that I've truly enjoyed surfing around your blog
posts. After all I will be subscribing to your feed and I hope you write again soon!
What's up everybody, here every person is sharing
these familiarity, so it's pleasant to read this web site,
and I used to visit this weblog all the time.
Excellent site. Lots of helpful information here.
I am sending it to several pals ans additionally sharing in delicious.
And of course, thanks to your effort!
Saved as a favorite, I really like your web site!
These are in fact great ideas in about blogging.
You have touched some fastidious things here. Any way keep
up wrinting.
I read this article fully about the comparison of most up-to-date and previous
technologies, it's amazing article.
Hello, all is going fine here and ofcourse every one
is sharing data, that's truly excellent, keep up writing.
You should be a part of a contest for one of the best sites on the net.
I'm going to highly recommend this site!
http://rssfeeds.wkyc.com/~/t/0/0/wk...
80anc0ajbxbc.xnp1ai%2Fbitrix%2Fredirect.php%3Fevent1%3Dclick_to_call%26event2%3D%26event3%3D%26goto%3Dhttp%3A%2F%2F45.8.146.160Good answers in return of this query with genuine arguments and
describing all regarding that.
Very nice post. I just stumbled upon your weblog and wanted to say that I've really enjoyed surfing around your blog posts.
In any case I'll be subscribing to your rss feed and I hope
you write again soon!
What a material of un-ambiguity and preserveness of valuable familiarity regarding
unexpected feelings.
I do not even know the way I ended up right here, but I assumed this publish was
once great. I don't know who you're however certainly you're going to a well-known blogger should you are not already.
Cheers!
Hi, I read your new stuff like every week. Your
humoristic style is awesome, keep it up!
Nice post. I learn something totally new and challenging on blogs I stumbleupon every
day. It will always be helpful to read through articles from other writers and use a little something from other web sites.
Howdy! This is my first visit to your blog! We are a
group of volunteers and starting a new project in a community in the same niche.
Your blog provided us beneficial information to work on. You have done a
marvellous job!
What a stuff of un-ambiguity and preserveness of precious know-how on the topic of unexpected feelings.
Today, I went tto thee beach with my kids. I found a sea shell and gave
it to my 4 year oold daughter and said "You can hear the ocean if you put this to your ear." She placed the sheol too her ear and screamed.
There was a hermit crab inside and it pincched her ear. She never wants to go back!
LoL I kow this is entirely off topic but I had to tell someone!
Hello to every body, it's my first pay a visit of this
website; this webpage includes remarkable and genuinely fine material in support of readers.
This web site truly has all of the information and facts I needed concerning
this subject and didn't know who to ask.
If some one wishes expert view about running a blog after that i suggest him/her to go to see this
website, Keep up the pleasant work.
Right away I am ready to do my breakfast, after
having my breakfast coming yet again to read other
news.
Howdy! Do you use Twitter? I'd like to follow you if that would be ok.
I'm definitely enjoying your blog and look forward to new posts.
This design is incredible! You most certainly know how to keep a reader amused.
Between your wit and your videos, I was almost moved to start my own blog (well,
almost...HaHa!) Wonderful job. I really enjoyed what you had to say, and more than that,
how you presented it. Too cool!
My brother suggested I might like this website.
He was entirely right. This post truly made my day. You can not
imagine simply how much time I had spent for this info!
Thanks!
No matter if some one searches for his necessary thing, therefore he/she needs to be available that in detail,
therefore that thing is maintained over here.
Spot on with this write-up, I actually believe this web
site needs a lot more attention. I'll probably be returning to
see more, thanks for the advice!
Hello! I'm at work browsing your blog from my new iphone 4!
Just wanted to say I love reading through your blog
and look forward to all your posts! Keep up the great work!
Greetings from California! I'm bored to tears at work so I decided to check
out your website on my iphone during lunch break. I love the knowledge you present here
and can't wait to take a look when I get home.
I'm surprised at how quick your blog loaded on my cell phone ..
I'm not even using WIFI, just 3G .. Anyways,
awesome site!
Great blog! Is your theme custom made or did you download it from somewhere?
A theme like yours with a few simple tweeks would
really make my blog stand out. Please let me know where you got your
theme. Thank you
Hello, for all time i used to check weblog posts here in the early hours in the
daylight, for the reason that i like to gain knowledge of more and
more.
Hello, I want to subscribe for this web site to get hottest updates, therefore where can i do it
please help.
What i do not understood is in fact how you are not really
much more smartly-liked than you may be right now.
You're very intelligent. You understand thus considerably in terms
of this subject, made me personally consider it from a lot of various angles.
Its like women and men aren't interested until it is something to accomplish with
Lady gaga! Your own stuffs excellent. All the time
care for it up!
Hi just wanted to give you a quick heads up and let you know a few of
the images aren't loading correctly. I'm not sure why but I think its a linking issue.
I've tried it in two different internet browsers and both
show the same outcome.
I go to see day-to-day some blogs and sites to read posts, but this webpage gives quality based content.
Hello! Quick question that's entirely off topic. Do you know how to make your site mobile friendly?
My website looks weird when viewing from my iphone4.
I'm trying to find a theme or plugin that might be able to fix this issue.
If you have any recommendations, please share.
Thank you!
When I initially commented I clicked the "Notify me when new comments are added" checkbox and now each time a comment is added I get
four emails with the same comment. Is there any way you can remove people from that service?
Thank you!
Quality articles or reviews is the key to invite the viewers
to visit the web site, that's what this site is providing.
I constantly spent my half an hour to read this webpage's content daily along with a
cup of coffee.
penis enlargement
great put up, very informative. I ponder why the other experts
of this sector don't realize this. You should continue your writing.
I am confident, you have a great readers' base already!
payday loan
Hey there! I just wanted to ask if you ever have any trouble with hackers?
My last blog (wordpress) was hacked and I ended up losing many months
of hard work due to no data backup. Do you have any methods
to protect against hackers?
This piece of writing is genuinely a pleasant one it assists new web users,
who are wishing for blogging.
It's difficult to find experienced people about this subject,
but you sound like you know what you're talking about!
Thanks
My family members every time say that I am killing my time here at net, except I know I am getting know-how every day by reading such nice posts.
Ahaa, its fastidious discussion regarding this article at this place at this webpage,
I have read all that, so now me also commenting at this place.
Sweet blog! I found it while searching on Yahoo News.
Do you have any suggestions on how to get listed in Yahoo News?
I've been trying for a while but I never seem to get there!
Appreciate it
hi!,I love your writing so a lot! proportion we be
in contact extra approximately your post on AOL? I need an expert on this space to unravel my problem.
May be that is you! Looking ahead to look you.
I'd like to find out more? I'd want to find out more details.
Hi, just wanted to say, I enjoyed this blog post.
It was inspiring. Keep on posting!
Hello, I would like to subscribe for this weblog to take hottest
updates, so where can i do it please help.
Wow, that's what I was exploring for, what a stuff! present here at this website, thanks admin of this web page.
Hi mates, its fantastic post on the topic of educationand fully explained,
keep it up all the time.
My brother recommended I would possibly like thiks
blog. He waas totally right. This publish actually made my day.
You cann't consider just how a lot time I had spent for this info!
Thanks!
You are so awesome! I don't suppose I've truly read through
anything like that before. So wonderful to find another person with genuine thoughts on this topic.
Really.. many thanks for starting this up. This site is something that is
required on the web, someone with some originality!
It is not my first time to visit this website, i am visiting this site dailly and obtain good data
from here daily.
Tremendous issues here. I am very satisfied to peer your post.
Thank you so much and I am looking forward to touch you.
Will you please drop me a e-mail?
I am in fact grateful to the owner of this web site who has shared this great paragraph
at at this time.
I'm truly enjoying the design and layout of your site.
It's a very easy on the eyes which makes it much more enjoyable for
me to come here and visit more often. Did you hire out a developer to create your theme?
Exceptional work!
You actually make it appear so easy with your presentation however I in finding
this matter to be really one thing which I think I would by no means understand.
It sort of feels too complicated and extremely large for me.
I am taking a look ahead in your subsequent post, I'll try to get the hang of
it!
Simply desire to say your article is as astonishing.
The clearness in your post is just great and i could
assume you are an expert on this subject. Well with your permission let me to grab your feed to keep up to date with forthcoming post.
Thanks a million and please continue the gratifying work.
you are truly a good webmaster. The website loading pace is amazing.
It seems that you're doing any unique trick.
Furthermore, The contents are masterwork. you
have done a excellent job on this matter!
What's up to all, how is all, I think every one is getting more from this website,
and your views are nice designed for new people.
penis enlargement
Fantastic goods from you, man. I have be aware
your stuff previous to and you are simply extremely wonderful.
I really like what you've acquired right here, really like what you are
stating and the way by which you say it. You are making
it enjoyable and you continue to care for to stay it wise.
I can't wait to learn much more from you. This is actually a terrific web site.
payday loan
penis enlargement
Hello, I think your site might be having browser compatibility issues.
When I look at your blog in Firefox, it looks fine but when opening in Internet Explorer, it has
some overlapping. I just wanted to give you a quick
heads up! Other then that, amazing blog!
Wonderful site. Lots of useful information here.
I am sending it to a few buddies ans also
sharing in delicious. And certainly, thank you in your effort!
You are so awesome! I do not think I've truly read a single thing like this before.
So wonderful to find somebody with some genuine thoughts on this subject.
Seriously.. thank you for starting this up. This site is
something that is required on the web, someone with a
little originality!
It's difficult to find well-informed people about this subject, but you sound like you know what you're talking about!
Thanks
Useful info. Lucky me I discovered your website by chance, and I
am shocked why this accident didn't happened in advance!
I bookmarked it.
I always used to study piece of writing in news papers but now as I am a user of web thus from now I am using net for content,
thanks to web.
This post presents clear idea in favor of the new people of blogging,
that in fact how to do blogging and site-building.
certainly like your web-site but you need to test the spelling on quite a few of your posts.
Several of them are rife with spelling issues and I to find it
very bothersome to inform the reality then again I'll certainly come back again.
I am not sure where you are getting your information, but good
topic. I needs to spend some time learning much more or
understanding more. Thanks for magnificent info I was looking for this information for my mission.
This website really has all the information I needed concerning this subject and didn't know who to ask.
There's certainly a lot to find out about this issue.
I really like all the points you made.
This is a very good tip especially to those fresh to the blogosphere.
Brief but very accurate information… Thanks for sharing this one.
A must read post!
penis enlargement
penis enlargement
I’m not that much of a internet reader to be honest but your blogs really nice, keep
it up! I'll go ahead and bookmark your website to come back later.
All the best
Hey I know this is off topic but I was wondering if you knew of any widgets I could add to
my blog that automatically tweet my newest twitter updates.
I've been looking for a plug-in like this for quite some time and was hoping maybe you would have some experience with something like this.
Please let me know if you run into anything. I truly enjoy reading your blog and I look forward to your
new updates.
https://www.termo-greet.ru/bitrix/r...
Keep this going please, great job!
watch porn video
watch porn video
I do accept as true with all of the concepts you have offered in your post.
They are really convincing and will definitely work.
Nonetheless, the posts are very quick for starters. May just you please extend them a bit
from subsequent time? Thank you for the post.
penis enlargement
Good answers in return of this issue with solid
arguments and explaining all on the topic of that.
راهنمای سرمایه گذاری در ترکیه
تا هر ساکن بدون در نظر گرفتن سطح درآمد یا سطح اجتماعی خود مکان و زندگی مناسب خود را بیابد.
جهت دریافت مشاوره حرفه ای میتوانید از طریق راه
های ارتباطی زیر با ما در تماس باشید.
برای تمام پرسشهای خود در مورد نمونه کارها و خدمات منحصر
به فرد ما با متخصصان ما در تماس
باشید. انجمن #loveistanbul و دریافت پیشنهادات
ویژه، دعوت نامه های VIP و اخبار و به روز رسانی های اختصاصی در مورد
استانبول. جهت دریافت مشاوره حرفه ای میتوانید از طریق راههای ارتباطی زیر با ما
در تماس باشید. توریستی بودن استانبول از این حیث میتواند بازدهی عالی به
همراه داشته باشد.
شهرهایی مانند استانبول، آنکارا، آدانا، ازمیر و بورسا میتوانند
انتخاب مناسبی برای این امر باشند.
سواحل دریای سیاه، مارمارا، دریای اژه و دریای مدیترانه علاوه بر
صنعت حمل و نقل توسعه یافته و پیشرفته، دستاوردهای زیادی را
برای بخش های مختلف اقتصادی این کشور به ارمغان آورده اند.
این کشور دارای 8،500 کیلومتر خط ساحلی است که در بیشتر آن ها
بندرهای مهم و کلیدی قرار دارد که برای انواع کسب و کارهای تجاری میتوانند کاربردی و
مناسب باشند. سرمایه گذاری در ترکیه یک حرکت هوشمندانه برای هر کسی است که به دنبال تنوع بخشیدن
به سبد سهام خود و استفاده از اقتصاد در حال رشد است.
چه به دنبال سرمایه گذاری در املاک و
مستغلات، تولید و یا فناوری باشید، ترکیه فرصت های زیادی را برای سرمایه گذاران ارائه می دهد.
payday loan
Hi there everyone, it's my first visit at this website, and post is genuinely fruitful for me, keep up posting such articles.
whoah this blog is wonderful i really like reading your articles.
Keep up the great work! You understand, a lot of persons are searching around
for this information, you could aid them greatly.
پمپ کارواش
There is definately a great deal to find out about this topic.
I like all the points you have made.
Hello, i read your blog from time to time and i own a similar one and
i was just wondering if you get a lot of spam feedback?
If so how do you reduce it, any plugin or anything you can advise?
I get so much lately it's driving me insane so any assistance is very much
appreciated.
Everything is very open with a very clear clarification of the issues.
It was truly informative. Your site is useful. Thanks for sharing!
It's remarkable to visit this web page and
reading the views of all friends about this piece of writing, while I am also eager of getting knowledge.
payday loan
payday loan
Highly descriptive post, I liked that a lot. Will there
be a part 2?
Useful information. Fortunate me I discovered your web site by accident, and I am shocked why this coincidence did not came about in advance!
I bookmarked it.
I always used to study piece of writing in news
papers but now as I am a user of web so from now I am using net for content, thanks to web.
What's up everybody, here every one is sharing such knowledge,
thus it's nice to read this weblog, and I used to pay a
visit this blog daily.
watch porn video
At this time it seems like Expression Engine is the best blogging platform out there right now.
(from what I've read) Is that what you're using on your blog?
Great blog you have got here.. It's difficult to find quality writing like yours nowadays.
I honestly appreciate individuals like you! Take care!!
I'm not sure where you are getting your info, but great topic.
I needs to spend some time learning more or understanding more.
Thanks for excellent information I was looking for this information for my mission.
Hmm it looks like your website ate my first comment (it was
super long) so I guess I'll just sum it up what I submitted and say, I'm thoroughly
enjoying your blog. I as well am an aspiring blog
writer but I'm still new to everything. Do you have any recommendations for rookie blog writers?
I'd certainly appreciate it.
I will right away grasp your rss as I can not in finding your email subscription hyperlink or newsletter service.
Do you've any? Kindly permit me understand
so that I may just subscribe. Thanks.
https://www.paritetus.com/bitrix/rk...
Good day! I know this is kinda off topic but I was wondering which blog platform are you using for this website?
I'm getting sick and tired of Wordpress because I've
had problems with hackers and I'm looking at options for another platform.
I would be great if you could point me in the direction of a good
platform.
I loved as much as you will receive carried out right here.
The sketch is attractive, your authored subject matter stylish.
nonetheless, you command get bought an shakiness over that you wish be delivering the
following. unwell unquestionably come further formerly again since exactly the
same nearly very often inside case you shield this hike.
This is the perfect webpage for everyone who really wants to understand this topic.
You understand a whole lot its almost tough to argue with you (not that
I actually will need to…HaHa). You definitely put a brand new spin on a topic that has been discussed for years.
Great stuff, just wonderful!
Hi colleagues, its enormous post about educationand entirely explained,
keep it up all the time.
Simply want to say your article is as surprising. The clearness for your submit is just
cool and that i can think you are a professional on this subject.
Well with your permission allow me to grasp your RSS feed to
stay up to date with drawing close post. Thanks 1,000,
000 and please continue the rewarding work.
Hi there, everything is going well here and ofcourse every one is sharing information,
that's actually fine, keep up writing.
You actually make it appear so easy with your presentation however I find this matter to be really one
thing which I think I'd never understand. It sort of
feels too complex and extremely extensive for me. I am looking ahead
to your subsequent post, I'll try to get the dangle
of it!
It's really very complicated in this full of activity life
to listen news on Television, so I simply use the web for that reason, and take the most
recent information.
penis enlargement
We're a gaggle of volunteers and opening a brand new scheme in our community.
Your site offered us with helpful information to work on. You've done
a formidable activity and our whole group might be grateful to
you.
If you're on the lookout for premier plumbing solutions in Phoenix, AZ, Best Water Treatment
Phoenix is unmatched as the #1 choice. We focuses on providing state-of-the-art plumbing services that cater
to the specific needs of Phoenix residents.
From drain cleaning to sewer line repair, our services are designed to tackle every plumbing challenge effectively.
Our expertise in residential and commercial plumbing positions
us as the preferred choice for Phoenix residents in need of reliable plumbing work.
Why are we the #1 choice? For starters, our
commitment to customer satisfaction is unmatched. Our team knows
how crucial prompt service, especially when it comes to plumbing
emergencies. Hence, you can count on us day and night to handle any
urgent plumbing needs.
Moreover, our skilled team in plumbing repairs and maintenance ensures that you are provided with optimal solutions.
Whether it's repairing pipes and leaks to ensuring
your water pressure is optimal, we do it all.
Employing the latest technology combined with a focus on sustainability means that your plumbing system is not only efficient but also sustainable.
This approach not only reduces your water bill but also helps in environmental conservation.
Customer satisfaction remains our utmost priority. Our goal isn't
just to solve your immediate issues but to ensure your plumbing
system's long-term efficiency. Our professionals works closely with you
to understand your specific needs, ensuring optimal results.
Lastly, when you need a top-rated plumber in Phoenix, AZ, look no further than Best Water Treatment Phoenix.
Thanks to our wide range of services, skilled professionals, and dedication to
customer satisfaction, you can trust your plumbing needs will be in the best hands.
Say goodbye to your plumbing worries. Contact us today to schedule a service and see why we're the top
choice for water treatment and plumbing services in Phoenix,
AZ.
In the heart of Las Vegas, finding an expert plumbing leak repair
service might seem daunting. Yet, one company
stands out for its unparalleled technique in fixing
leaks, which makes it the go-to choice for locals and businesses alike.
With years of experience, this service is adept at detecting and
repairing every kind of plumbing leaks, from simple faucet drips to complex pipe bursts.
Utilizing the cutting-edge technology in leak detection, they guarantee
that disruption is minimal to your property and routine.
Why are they considered the best in Las Vegas?
To begin with, their speedy service is incomparable.
Knowing that water damage waits for no one, they offer around-the-clock emergency
responses, guaranteeing that they're always ready to assist.
Additionally, their team of skilled plumbers is not only adept with
the newest repair technologies but also in preventing future
leaks. After repairing any leak, they conduct a thorough inspection of your plumbing system to identify any future issues, giving
recommendations on how to avert them.
Their commitment to customer satisfaction is apparent in all their work.
From the minute you contact them, you're treated with professionalism,
respect, and empathy. Every step of the way, they keep
you informed, offering upfront costs and detailed
explanations of the work required.
But don't just take our word for it. Many reviews from happy clients emphasize their positive experiences with the team,
citing both the work's quality but also the friendliness and
professionalism of the staff.
In conclusion, if you're dealing with a plumbing leak in Las Vegas, NV, choosing this top-notch leak repair service
is a decision you won't regret. The expertise of their team in water pipe fix, along with
their dedication to quality, makes them the
best choice in the industry.
I've been looking forward to talking about why Best Las Vegas Water Heaters is the #1 choice when you're in need of
a plumbing service in Las Vegas. Whether you're dealing
with pipe repair or need a emergency plumbing service, they've got you covered.
Here's why they stand out:
1. Comprehensive Plumbing Services
First and foremost, their range of services is unmatched.
From basic faucet installations to complex sewer line repairs, they handle it all.
This means no matter your issue, whether it's toilet repairs, you have a go-to
team ready to help.
2. Expertise and Experience
The team at the company is not only highly skilled but also has years of experience under
their belts. They understand the ins and outs of residential plumbing, ensuring that they can solve any
problem with efficiency.
3. Quality of Service
Their commitment to quality is evident in every job they undertake.
Prompt response times, thorough inspections, and durable repairs are
just a few of the traits that make them stand out.
Plus, they're known for their courteous service, making every plumbing project a smooth experience.
4. Emergency Plumbing Services
A major benefit they offer is round-the-clock emergency services.
This means if you ever face a burst pipe in the middle of the night, Best
Las Vegas Water Heaters are just a call away, ready to address the issue promptly.
5. Customer Satisfaction
Ultimately, their focus on customer satisfaction is
what truly sets them apart. They go above and beyond to ensure that every customer is happy with the work done, from plumbing inspections to sump pump installations.
Their positive reviews speak volumes about their dedication to excellence.
In conclusion, if you're in Las Vegas and in need of a
reliable plumber, this company should be your go-to option. Their expertise, range of services, commitment to quality, and focus on customer satisfaction are unmatched.
Give them a try and see for yourself why they're the top choice.
Best regards,
A satisfied customer
I really love your website.. Pleasant colors & theme.
Did you build this web site yourself? Please reply back as I'm looking to create my own site and would like to
learn where you got this from or exactly what the theme is named.
Kudos!
I go to see daily a few websites and sites to read articles or reviews, except this webpage offers feature based articles.
My coder is trying to persuade me to move to
.net from PHP. I have always disliked the idea because of the costs.
But he's tryiong none the less. I've been using WordPress on several websites for about a year and am nervous about switching to another platform.
I have heard fantastic things about blogengine.net. Is there a way I
can transfer all my wordpress content into it?
Any help would be really appreciated!
I enjoy what you guys are up too. This sort
of clever work and reporting! Keep up the fantastic
works guys I've incorporated you guys to my personal blogroll.
Hi, I do think this is an excellent web site. I stumbledupon it I am going
I am going
to return once again since I book-marked it. Money and freedom
is the greatest way to change, may you be rich and continue to help others.
Wow! Finally I got a blog from where I know how to in fact obtain valuable data concerning my study and knowledge.
Oh my goodness! Incredible article dude! Many thanks, However I am going through issues with your RSS.
I don't know why I cannot subscribe to it. Is there anyone else
getting the same RSS issues? Anybody who knows the answer can you kindly respond?
Thanks!!
бэтмен апполо пелевин
Truly when someone doesn't know after that its up to other users that they will help, so here it occurs.
پهباد سمپاش
Write more, thats all I have to say. Literally, it seems as though you relied on the video
to make your point. You clearly know what youre talking about, why waste
your intelligence on just posting videos to your weblog when you could be giving us something informative to read?
Hurrah, that's what I was seeking for, what a stuff! present here
at this web site, thanks admin of this web page.
I absolutely love your blog and find almost all of your post's to be just what I'm looking for.
can you offer guest writers to write content in your case?
I wouldn't mind publishing a post or elaborating on most of the subjects you write regarding here.
Again, awesome web log!
Great items from you, man. I have understand your stuff previous
to and you're just extremely magnificent.
I really like what you have received right here, certainly like what
you're stating and the best way wherein you assert it.
You're making it enjoyable and you continue to care for to keep it sensible.
I can't wait to read much more from you. This is actually a terrific website.
Quality articles or reviews is the main to be a focus for the visitors to go to
see the site, that's what this website is providing.
Appreciate this post. Let me try it out.
penis enlargement
It is not my first time to go to see this site, i am browsing this web site
dailly and obtain good information from here every day.
You could certainly see your skills in the work you write.
The world hopes for even more passionate writers like you who aren't afraid to mention how they
believe. All the time follow your heart.
Good day! Would you mind if I share your blog with my twitter group?
There's a lot of people that I think would really enjoy your content.
Please let me know. Many thanks
Just wanna input that you have a very decent site, I like the pattern it actually stands out.
I'm not sure exactly why but this site is loading incredibly slow for me.
Is anyone else having this issue or is it a issue on my end?
I'll check back later on and see if the problem still exists.
Thanks in favor of sharing such a nice opinion, paragraph is pleasant,
thats why i have read it entirely
I enjoy looking through an article that can make men and women think.
Also, thanks for allowing me to comment!
I do accept as true with all of the concepts you have
presented for your post. They are really convincing and
can definitely work. Nonetheless, the posts are too brief for starters.
Could you please extend them a bit from next time?
Thank you for the post.
It's difficult to find experienced people in this particular topic,
but you sound like you know what you're talking about!
Thanks
Ahaa, its fastidious conversation on the topic of this piece of writing at this place at this web site, I have read all that, so now me also commenting at this place.
I've been browsing online greater than 3 hours as of late, but I by no means found any
fascinating article like yours. It's pretty worth enough for me.
In my view, if all website owners and bloggers made
excellent content material as you probably did, the internet will likely be a lot more useful than ever before.
Awesome blog! Do you have any tips and hints for aspiring writers?
I'm hoping to start my own blog soon but I'm a little lost on everything.
Would you propose starting with a free platform like Wordpress or go for a paid option? There
are so many choices out there that I'm completely confused ..
Any suggestions? Bless you!
Informative article, exactly what I was looking for.
Heya i am for the first time here. I found this board and I find It truly helpful & it helped me out much.
I hope to give one thing back and aid others such as you
aided me.
I every time used to read piece of writing in news papers but now
as I am a user of web therefore from now I am using net for content, thanks to web.
Hello! Someone in my Myspace group shared this
website with us so I came to give it a look. I'm definitely loving the information. I'm book-marking and will be tweeting this to my followers!
Terrific blog and fantastic style and design.
of course like your web site but you need to test the spelling on quite a few of your posts.
Several of them are rife with spelling problems and I find
it very bothersome to inform the truth nevertheless I'll
surely come back again.
payday loan
I'd like to thank you for the efforts you've put
in penning this website. I'm hoping to view
the same high-grade content by you later on as well.
In truth, your creative writing abilities has motivated me to
get my own website now
Hi would you mind stating which blog platform you're working with?
I'm going to start my own blog soon but I'm having a hard time
making a decision between BlogEngine/Wordpress/B2evolution and Drupal.
The reason I ask is because your layout seems different then most
blogs and I'm looking for something completely unique. P.S Apologies for being off-topic but I had to ask!
Stunning story there. What occurred after? Good luck!
you're in reality a just right webmaster. The web site loading pace is incredible.
It sort of feels that you're doing any unique trick. Furthermore, The contents are masterpiece.
you've done a fantastic process on this subject!
Sweet blog! I found it while surfing around on Yahoo News.
Do you have any suggestions on how to get listed in Yahoo News?
I've been trying for a while but I never seem to get there!
Thanks
Wow! Finally I got a weblog from where I be capable of genuinely
take helpful facts regarding my study and knowledge.
I was suggested this web site by my cousin. I'm not sure whether this post is
written by him as nobody else know such detailed about my problem.
You are amazing! Thanks!
Thanks for every other excellent article. The place else may anyone get that kind of
information in such an ideal method of writing?
I've a presentation next week, and I am at the search for such
information.
If you are going for best contents like myself, simply visit this web page everyday since it
presents feature contents, thanks
https://heylink.me/jeparatotolink/
https://mez.ink/jeparatotologin
I know this web page offers quality based posts and extra information, is there any other web site which gives such things in quality?
Hi, Neat post. There's a problem along with your web
site in web explorer, may test this? IE still is the market leader and a
good part of other people will miss your magnificent writing because of this problem.
Wonderful blog! I found it while browsing on Yahoo News.
Do you have any suggestions on how to get listed in Yahoo News?
I've been trying for a while but I never seem to get there!
Cheers
Hello! This is kind of off topic but I need some help from an established blog.
Is it difficult to set up your own blog? I'm not very techincal but
I can figure things out pretty fast. I'm thinking about creating my own but I'm not sure
where to begin. Do you have any points or suggestions? With thanks
What's up, its fastidious article concerning media print,
we all know media is a wonderful source of information.
Superb post but I was wanting to know if you could write
a litte more on this topic? I'd be very grateful if you could elaborate a
little bit more. Kudos!
Wonderful blog! I found it while surfing around on Yahoo News.
Do you have any suggestions on how to get listed in Yahoo News?
I've been trying for a while but I never seem to get there!
Appreciate it
watch porn video
My brother suggested I might like this website. He was once totally
right. This put up actually made my day. You can not imagine simply
how a lot time I had spent for this info! Thanks!
Djinn amoureux: comment s'en débarrasser?
C'est quoi le djinn amoureux ?
Une croyance qui provient de la culture arabe et musulmane.
Selon cette croyance, un djinn (ou jinn) est un être surnaturel, souvent décrit comme un esprit ou une créature invisible dotée
de pouvoirs.
Un "jinn" ou "djinn" ou "jnoun" au pluriel
Les djinns sont considérés comme des entités distinctes des humains, mais ils peuvent interagir
avec notre monde.
Le djinn amoureux, comme son nom l'indique, est un djinn qui serait tombé amoureux d'une personne humaine
Les signes et symptômes présumés
Selon les croyances populaires, le djinn amoureux peut se manifester de différentes manières, telles que des rêves érotiques, des obsessions amoureuses, un sentiment
d'être possédé(e), des changements soudains de comportement ou des symptômes
physiques inexplicables.
On dit que le djinn amoureux exerce une certaine influence sur les émotions et les
pensées de la personne qu'il aime.
Le djinn amoureux peut-il être un homme? une femme? Les deux?
Selon les croyances populaires qui attribuent aux djinns une dimension amoureuse, il est généralement
admis que les djinns amoureux peuvent être de sexe masculin ou féminin.
Ces croyances suggèrent que les djinns amoureux peuvent
manifester leur attirance et leur affection envers les humains, peu importe leur
propre genre.
Offrez vous des moments de bien-être avec La
Maison des Sultans
Découvrez nos coffrets cadeaux:
Le Coffret Cadeau "Bleu"
Le Coffret Cadeau "Rose Eternelle"
Le Coffret Cadeau "Lait de Chèvre"
Le Coffret Cadeau "Gold"
Comment se débarrasser des djinns en Islam?
Quelles invocations contre les djinns?
Dans la tradition islamique, la récitation du Coran est considérée comme un moyen puissant
de repousser les djinns. Certains versets spécifiques,
tels que les sourates Al-Falaq (113) et An-Nas (114), sont souvent recommandés
pour se protéger contre les influences négatives des
djinns.
Il existe différentes invocations et prières qui sont censées aider à repousser les djinns.
Par exemple, la recherche de protection en récitant l'invocation du "Tawhid" (l'unicité de Dieu) ou en demandant la protection d'Allah contre les djinns et les influences néfastes.
Certains rituels de purification, tels que le bain rituel (ghusl) ou la pratique régulière des ablutions
(wudhu), sont considérés comme bénéfiques pour repousser les influences négatives des djinns.
Dans certaines cultures, il est courant de consulter des personnes réputées pour
leur expertise dans la guérison spirituelle,
comme les raqis ou les personnes spécialisées
dans les exorcismes. Ils peuvent recommander des pratiques spécifiques ou effectuer des rituels pour traiter les cas présumés de présence de djinns.
"J'ai un djinn en moi": la roqya est-elle une solution pour lutter contre
les djinns?
Pratique de guérison spirituelle, la roqya est souvent réalisée par des personnes qualifiées appelées "raqis" ou "praticiens de la roqya".
Ces spécialistes peuvent réciter des versets du Coran, des
invocations spécifiques et utiliser des méthodes traditionnelles pour repousser les
influences négatives des djinns et aider à la guérison spirituelle.
Le henné pour aider à se protéger des influences négatives
Dans certaines cultures, il existe une croyance populaire
selon laquelle l'utilisation du henné peut aider
à se protéger des influences négatives des djinns amoureux.
Le henné est une plante qui produit une poudre utilisée pour créer des motifs temporaires sur
la peau, généralement lors de cérémonies ou d'événements
spéciaux tels que les mariages.
Selon cette croyance, l'application de motifs de henné sur le corps, en particulier sur les mains et les pieds, est supposée offrir une
protection contre les djinns amoureux.
On pense que les motifs de henné agissent comme une barrière symbolique ou spirituelle qui empêche les djinns d'interagir avec la personne et de causer des troubles amoureux ou des obsessions.
Les djinns amoureux sont-ils cités dans le Coran?
Il n'y a pas de mention spécifique des djinns amoureux en tant que concept dans le Coran.
Les récits coraniques se concentrent davantage sur la nature des djinns en tant qu'êtres
créés par Dieu et sur leur relation avec les humains.
Dans le Coran, les djinns sont mentionnés dans plusieurs
sourates, notamment dans la sourate Al-Jinn (72).
Cette sourate parle des djinns qui ont écouté la récitation du Coran et qui ont
été guidés vers la vérité.
Elle souligne également que les djinns, tout comme les humains,
ont été créés pour adorer Dieu.
Que disent les hadiths sur les djinns?
Certains hadiths font référence à ces créatures surnaturelles dans l'islam.
Voici quelques-uns des enseignements des hadiths concernant les djinns :
Selon les hadiths, les djinns sont une création d'Allah distincte de celle des humains.
Ils sont faits de fumée ou de feu sans fumée. Ils vivent dans un monde parallèle
au nôtre et sont invisibles à l'œil humain, sauf s'ils choisissent
de se manifester.
Les djinns sont décrits comme ayant des pouvoirs et des capacités surhumaines.
Ils peuvent prendre différentes formes, se déplacer rapidement et posséder les corps humains.
Certains hadiths mentionnent également que les djinns
peuvent inspirer des pensées et des idées aux humains.
Selon les hadiths, les djinns sont également soumis à
l'islam. Certains d'entre eux sont croyants et pratiquent la religion, tandis que d'autres sont mécréants.
Les djinns peuvent être récompensés ou punis en fonction de leurs actions, tout comme les humains.
Les hadiths mentionnent que le prophète Muhammad a eu des interactions avec les djinns.
Il est dit qu'il a reçu la récitation du Coran directement des anges et des djinns.
Certains hadiths décrivent également des incidents où le prophète a
conseillé ses compagnons sur la façon de se protéger contre les djinns et de rechercher refuge auprès
d'Allah contre leur influence néfaste.
Vivez la magie des Mille et Une Nuits avec La Maison des Sultans
Découvrez nos coffrets cadeaux:
Le Coffret Cadeau "Bleu"
Le Coffret Cadeau "Rose Eternelle"
Le Coffret Cadeau "Lait de Chèvre"
Le Coffret Cadeau "Gold"
FAQ / Foire aux questions
1. Comment faire fuir les djinns ?
Pour faire fuir les djinns, on peut réciter des versets coraniques protecteurs et des invocations
spécifiques.
2. Quand le djinn se manifeste ?
Lorsque le djinn se manifeste, il peut y avoir des signes tels que des bruits étranges,
des sensations de présence ou des perturbations dans l'environnement.
3. Quel est le djinn le plus puissant ?
Il n'y a pas de consensus sur quel djinn est le plus puissant, car les croyances varient, mais dans
certaines traditions, Iblis (ou Shaytan) est considéré comme l'un des djinns les plus puissants en raison de son rôle de tentateur
4. C'est quoi un jnoune ?
Un jnoune, également appelé djinn, est une créature surnaturelle issue de
la mythologie arabe et islamique, souvent perçue comme étant dotée de pouvoirs et d'une
volonté propre.
5. Qu'est-ce qu'un groupe de djinns?
Un groupe de djinns est généralement appelé un "génie" ou "groupe de génies"
dans le contexte des légendes et des croyances islamiques et
arabes. Les djinns sont des êtres surnaturels qui
peuvent être regroupés en différentes catégories en fonction de leurs caractéristiques et de leurs pouvoirs.
Par exemple :
Djinn : il s'agit d'une catégorie générale de génies, qui
peuvent être bons, neutres ou maléfiques.
Ils sont souvent considérés comme des créatures faites de
fumée ou de feu et sont dotés de libre arbitre.
Les ifrits sont généralement considérés comme des djinns maléfiques ou démoniaques.
Ils sont puissants et sont souvent associés à des actions malveillantes.
Les marids sont parmi les djinns les plus
puissants. Ils sont souvent associés à l'eau
et sont considérés comme très puissants, mais ils peuvent être bons ou
mauvais.
Les janns sont souvent décrits comme des djinns habitant dans les déserts et les régions sauvages.
Ils sont souvent associés à la nature et aux esprits de la terre.
Sila : Les silas sont des génies féminins souvent associés à l'eau et à la protection des enfants.
6. A quoi ressemble un djinn selon les témoignages?
Les djinns sont souvent considérés comme invisibles à l'œil humain. Mais ils peuvent choisir de se rendre visibles s'ils le souhaitent.
Les djinns sont parfois décrits comme étant capables de prendre la forme d'êtres humains, ce
qui leur permet de se mêler aux humains et
de les tromper.
Les djinns peuvent également se transformer en animaux, ce qui peut être
utilisé pour espionner ou causer des perturbations (créature à pattes de chèvre, au corps poilu, parfois
grands, parfois de la taille d'un chat)
Dans la tradition islamique, les djinns sont souvent décrits comme étant créés à partir de fumée
ou de feu, ce qui peut influencer leur apparence.
Certains témoignages et légendes décrivent les djinns comme ayant des formes monstrueuses,
avec des caractéristiques terrifiantes.
Les djinns sont souvent considérés comme étant capables
de changer de forme à volonté, ce qui leur permet de se transformer en différentes apparences.
Quelle est la définition du mot djinn ?
Le terme djinn vient du mot arabe « jinn » qui signifie « caché » ou «
invisible ». Un djinn est une créature surnaturelle présente dans la mythologie arabe et
partagée par toutes les cultures islamiques. On les considère
généralement comme des esprits ou des êtres spirituels, parfois associés à des forces magiques et surnaturelles.
Certains croient même que certains djinns peuvent se lier
à des humains et même tomber amoureux.
Quels animaux peuvent voir les djinns ?
Les djinns sont des êtres spirituels capables de se manifester sous forme humaine,
animale ou encore végétale. Bien que les djinns puissent
voir tous les animaux, ils sont particulièrement attirés par
les oiseaux, les chats et les chiens. On raconte même que certains djinns peuvent tomber amoureux de ces animaux et leur offrir leur
protection.
Quels sont les types de djinns en islam?
Les djinns peuvent être divisés en trois catégories : les djinns bienfaiteurs, les djinns neutres et les djinns maléfiques.
Les djinns bienfaiteurs sont les plus courants et peuvent être invoqués pour obtenir l’amour,
la fortune, la santé et la prospérité. Les djinns neutres sont
plus difficiles à invoquer et peuvent être bons ou mauvais en fonction des circonstances.
Enfin, les djinns maléfiques sont les plus difficiles à invoquer et sont généralement invoqués pour
faire du mal aux autres.
C'est quoi un jnoun ?
Les djinns sont des êtres surnaturels présents dans la mythologie arabe et musulmane.
On les qualifie souvent de djinns amoureux car ils peuvent s'attacher à des personnes et développer une relation amoureuse avec elles.
Les djinns sont généralement représentés comme des êtres invisibles dotés d'une force surnaturelle.
Mariage djinn, quelle signification?
Le mariage djinn est une cérémonie qui a un sens profond et spirituel.
Il existe de nombreuses légendes racontant
des histoires d’amour entre des humains et des djinns, mais le mariage djinn est
plus qu’une simple légende. Il est un lien spirituel entre un humain et un djinn,
qui leur permet de partager leurs énergies afin de créer une harmonie mutuelle.
Greetings! I've been reading your website for a while
now and finally got the courage to go ahead and give
you a shout out from Dallas Texas! Just wanted to say keep up the fantastic
job!
Hi there to every body, it's my first pay a quick visit of
this website; this blog includes remarkable and in fact fine data in favor of visitors.
You are so cool! I don't suppose I've read anything like that before.
So wonderful to find somebody with some genuine thoughts on this subject.
Seriously.. thank you for starting this up. This web site
is one thing that's needed on the web, someone with some originality!
آموزش برق خودرو
آموزش ریمپ ایسیو ( ECU )
آموزش سفالگری
آموزش حسابداری
آموزش کارشناسی رنگ خودرو
آموزش سوزن دوزی
آموزش نتورک پلاس
آموزش نقاشی و طراحی (مقدماتی تا پیشرفته)
آموزش باریستا
آموزش کابینت سازی
آموزش نرم افزار EPLAN
آموزش برق ساختمان
آموزش طراحی صحنه
آموزش دوبله (دوبلور)
آموزش فیلم برداری
آموزش تعمیرات ایسیو
آموزش بازرسی جوش
آموزش چرم دوزی
آموزش حصیر بافی
آموزش تعمیرات ماشین لباسشویی
آموزش فتوشاپ (Photoshop)
آموزش شبکه سیسکو (Cisco)
آموزش مهندسی معکوس بردهای الکترونیکی
آموزش نقاشی با پاستل
آموزش تعمیرات لوازم خانگی
آموزش نگارگری (مینیاتور)
آموزش نصب دوربین مدار بسته
آموزش نصب درب اتوماتیک شیشه ای
آموزش نصب کولر گازی
آموزش فیبر نوری
آموزش کارگردانی تئاتر
آموزش رنگ و روغن
آموزش جوشکاری (SMAW)
آموزش HTML و CSS
آموزش نصب ضبط و باند خودرو
آموزش مکانیک خودرو
آموزش تعمیرات کولر و بخاری خودرو
آموزش کیک پزی
آموزش کیک کافی شاپی
آموزش عکاسی حرفه ای
آموزش قالی بافی
آموزش تعمیرات پرینتر
آموزش نصب اعلام حریق
آموزش 3D MAX
آموزش طراحی سایت با وردپرس
آموزش ایلوستریتور (Illustrator)
آموزش نصب آنتن مرکزی
آموزش نصب آیفون صوتی و تصویری
آموزش نصب آسانسور
آموزش ایندیزاین (InDesign)
آموزش کلید سازی و قفل سازی
آموزش کمک حسابدار
آموزش تعمیرات موتور سیکلت
آموزش بازیگری
آموزش نصب کرکره برقی
آموزش تاسیسات ، نصب و تعمیر موتورخانه
آموزش مونتاژ و ارتقا کامپیوتر
آموزش نصب پکیج
آموزش موشن گرافیک
آموزش طراحی برد الکترونیکی
آموزش تعمیرات اسکنر
آموزش ICDL درجه 2 و درجه 1
آموزش تعمیر اگزوز ( اگزوز سازی )
آموزش نصب اعلام حریق آدرس پذیر
آموزش اینستاگرام مارکتینگ
آموزش اتوکد (AutoCAD)
آموزش تابلو برق صنعتی
آموزش نجاری (درودگری)
آموزش نرم افزار آلتیوم دیزاینر
آموزش افترافکت (After Effects)
آموزش کافی شاپ و کافه داری
آموزش پسیو شبکه
آموزش نقاشی با مداد رنگی
آموزش پی اچ پی (php)
آموزش نرم افزار Word پیشرفته
آموزش تابلو روان و ال ای دی
آموزش جاجیم بافی
آموزش نصب پنل خورشیدی
آموزش تعویض روغنی و آپاراتی
آموزش شیرینی پزی
آموزش گریمور سینمایی
آموزش نرم افزار متلب
آموزش رباتیک
آموزش دیجیتال مارکتینگ
آموزش برنامه نویسی جاوا
آموزش جوش آرگون (تیگ/TIG)
آموزش بوت استرپ
آموزش گیربکس اتوماتیک و دستی
آموزش فینگر فود
آموزش تعمیرات دوربین مدار بسته
آموزش برق صنعتی
آموزش خوشنویسی (خودکار و قلم)
آموزش تعمیرات ماشین های اداری
آموزش برنامه نویسی ++C
آموزش سیاه قلم
آموزش برنامه نویسی پایتون
آموزش لوله کشی ساختمان
آموزش تعمیرات دوچرخه
آموزش تعویض گلس گوشی
آموزش آشپزی
آموزش تعمیرات نیسان و تویوتا
آموزش نقاشی آکریلیک
آموزش نرم افزار های حسابداری
آموزش لیسه گیری بدنه خودرو
آموزش تدوین
آموزش تعمیرات ماشین ظرفشویی
آموزش تعمیرات یخچال و فریزر
آموزش تعمیرات لوازم سرمایشی و گرمایشی
آموزش صافکاری خودرو ( pdr و سنتی )
آموزش تعمیرات برد الکترونیکی
آموزش تعمیرات لپ تاپ و کامپیوتر
آموزش نصب دزدگیر اماکن
آموزش نصب سانترال
آموزش نصب دزدگیر ماشین
آموزش پریمیر (Adobe Premiere)
آموزش قلاب بافی
آموزش تعمیرات فکس
آموزش آردوینو
آموزش تعمیر CNG و LPG
آموزش نورپردازی
آموزش تعمیرات ماکروفر
آموزش تعمیرات پکیج
آموزش تعمیرات موبایل
آموزش تعمیرات قفل و شیشه بالابر خودرو
آموزش نصب جک برقی
آموزش PLC ( پی ال سی )
آموزش ترمه دوزی
آموزش نمایشنامه و فیلمنامه نویسی
آموزش برنامه نویسی اندروید
آموزش جوش co2
آموزش گلیم بافی
آموزش صدا برداری
آموزش سیم پیچی موتور
آموزش نرم افزار Excel پیشرفته
آموزش تعمیرات لوازم گازسوز
آموزش نقاشی گواش
آموزش انیمیشن سازی
آموزش میل بافی
آموزش تعمیرات لوازم صوتی تصویری
آموزش جلوبندی سازی خودرو
آموزش سئو سایت
آموزش بازسازی و تعمیر خودرو های
کلاسیک
آموزش امنیت شبکه
آموزش طراحی چهره
آموزش تعمیرات فتوکپی
آموزش نقاشی روی سفال
آموزش دیاگ و انژکتوری خودرو
آموزش تعمیرات ساعت
آموزش نرم افزار دیالوکس
آموزش هوشمند سازی ساختمان
آموزش میکروتیک (MikroTik)
آموزش قرارداد نویسی و مدیریت قراردادها
آموزش Corel Draw
آموزش تعمیرات کولر گازی (اسپلیت)
آموزش نقاشی خودرو
آموزش نصب پکیج
آموزش plc (پی ال سی)
آموزش تعمیرات فکس
آموزش تری دی مکس ( 3ds Max)
آموزش میل بافی
آموزش آلتیوم دیزاینر
آموزش اتوکد (AutoCAD)
آموزش گلیم بافی
آموزش تعمیرات موبایل
آموزش طراحی چهره
آموزش تعمیرات لباسشویی
آموزش مونتاژ و اسمبل کامپیوتر
آموزش نجاری و درودگری
آموزش برق خودرو
آموزش تعمیرات موتور سیکلت
آموزش نرم افزار حسابداری سپیدار
آموزش راه اندازی و تعمیرات موتورخانه
آموزش تعمیر قفل و شیشه بالابر
خودرو
آموزش بازیگری تئاتر و سینما
آموزش تدوین و تدوینگری
آموزش نصب آنتن مرکزی
آموزش صدابرداری
آموزش لیسه گیری خودرو
آموزش ترمه بافی و ترمه دوزی
آموزش قلاب بافی
آموزش مدیریت مالی
آموزش تعمیرات پکیج
آموزش کلید سازی و قفل سازی
آموزش نرم افزار حسابداری هلو
آموزش تعمیرات ماشین های اداری
آموزش طراحی سایت با وردپرس
آموزش تعمیرات ایسیو
آموزش نصب درب اتوماتیک شیشه ای
آموزش موشن گرافیک
آموزش نقاشی رنگ روغن
آموزش تابلو برق صنعتی
آموزش کمک حسابدار
آموزش نصب دوربین مدار بسته
آموزش جاجیم بافی
آموزش پریمیر Premiere
آموزش سوزن دوزی و سوزن بافی
آموزش ساخت تابلو روان LED
آموزش تعمیرات برد الکترونیکی
آموزش شیرینی پزی
آموزش تعمیرات ماکروفر و ماکروویو
آموزش نصب دزدگیر اماکن
آموزش نقاشی خودرو
آموزش تعویض روغنی و آپاراتی
آموزش نقاشی روی سفال
آموزش تعمیرات لوازم خانگی
آموزش نصب آیفون صوتی و تصویری
آموزش انیمیشن سازی و ساخت انیمیشن
آموزش نصب کرکره برقی
آموزش تعمیرات دوربین مداربسته
آموزش جلوبندی سازی خودرو
آموزش کارگردانی تئاتر و نمایش
آموزش فتوشاپ photoshop
آموزش php و MySQL
آموزش کابینت سازی
آموزش نرم افزار ایندیزاین InDesign
آموزش برق صنعتی
آموزش سیم پیچی موتور
آموزش عکاسی
آموزش نصب جک برقی
آموزش تعمیرات دوچرخه
آموزش html css
آموزش جاوا اسکریپت JavaScript
آموزش نصب سانترال
آموزش میکروتیک
آموزش هوشمند سازی ساختمان
آموزش تعمیرات پرینتر
آموزش نورپردازی در عکاسی و فیلمبرداری
آموزش تعمیرات اگزوز خودرو
آموزش تعمیرات یخچال
آموزش مینیاتور و نگارگری
آموزش برنامه نویسی اندروید
آموزش مکانیک خودرو
آموزش چرم دوزی
آموزش امنیت شبکه
آموزش سیاه قلم
آموزش سفالگری
آموزش ایجکس Ajax و جی کوئری JQuery
آموزش نصب سیستم صوتی ماشین
آموزش تعمیرات قهوه ساز
آموزش افترافکت After Effects
آموزش ICDL درجه 1 و 2
آموزش تعمیرات کولر گازی
آموزش جوشکاری CO2
آموزش کارشناسی رنگ خودرو
آموزش تعمیرات فتوکپی
آموزش eplan (ایپلن)
آموزش نمایشنامه نویسی تئاتر
آموزش کیک پزی
آموزش نقاشی با پاستل
آموزش اکسل
آموزش نصب کولر گازی
آموزش فیبر نوری
آموزش لوله کشی ساختمان
آموزش دوبله و گویندگی
آموزش ادوبی ایلوستریتور
آموزش نصب اعلام حریق آدرس پذیر و متعارف
آموزش صافکاری pdr و سنتی
آموزش قرارداد نویسی و مدیریت قرارداد
آموزش رباتیک
آموزش برق ساختمان
آموزش حسابداری
آموزش نصب پنل خورشیدی
آموزش پسیو شبکه
آموزش تعمیرات
آموزش نتورک پلاس
آموزش تعمیرات لپ تاپ و کامپیوتر
آموزش خوشنویسی و خطاطی
آموزش تعمیرات اسکنر
آموزش دیجیتال مارکتینگ
آموزش کورل دراو CorelDraw
آموزش کافی شاپ و باریستا
آموزش فیلمبرداری و تصویر برداری
آموزش گیربکس خودرو
آموزش طراحی برد الکترونیکی
آموزش فیلمنامه نویسی کوتاه و بلند
آموزش حصیر بافی
آموزش تعمیرات ماشین ظرفشویی
آموزش نصب دزدگیر ماشین
آموزش برنامه نویسی پایتون python
آموزش ++C ( سی پلاس پلاس )
آموزش حسابداری مالیاتی
آموزش سیسکو cisco
آموزش سئو seo
آموزش آردوینو
آموزش گریم سینمایی و چهره پردازی
آموزش بازرسی جوش
آموزش قالی بافی
آموزش آسانسور
آموزش طراحی صحنه
آموزش بازرسی جوش
آموزش جوشکاری ( SMAW )
آموزش جوش Co2
آموزش جوشکاری آرگون (تیگ)
آموزش کیک کافی شاپی
آموزش کیک پزی
آموزش تعمیرات ساعت (ساعت سازی)
آموزش برق خودرو
آموزش نقاشی روی سفال
آموزش میکروتیک
آموزش نتورک پلاس
آموزش بازیگری
آموزش مینیاتور
آموزش نورپردازی
آموزش نمایشنامه نویسی
آموزش نصب جک برقی
آموزش نصب کرکره برقی
آموزش نرم افزار هلو
آموزش کارشناسی خودرو
آموزش نصب سانترال
آموزش فیلمنامه نویسی
آموزش حصیر بافی
آموزش طراحی چهره
آموزش سیسکو (Cisco)
آموزش نقاشی با مداد رنگی
آموزش نصب پکیج
آموزش قالی بافی
آموزش سیاه قلم
آموزش تعمیرات پکیج
آموزش پی ال سی (PLC)
آموزش گلیم بافی
آموزش باریستا
آموزش کافی شاپ
آموزش نقاشی پاستل
آموزش حسابداری مالیاتی
آموزش کمک حسابدار
آموزش چرم دوزی
آموزش صافکاری خودرو + دوره صافکاری
pdr
آموزش نقاشی آبرنگ
آموزش نصب درب اتوماتیک شیشه ای
آموزش نجاری
آموزش نصب کولر گازی
آموزش تعمیرات کولر گازی
آموزش قلاب بافی
آموزش ساخت تابلو روان
آموزش شیرینی پزی
آموزش لوله کشی ساختمان
آموزش نصب دزدگیر اماکن
آموزش نصب اعلام حریق
آموزش نصب دوربین مدار بسته
آموزش نصب پنل خورشیدی
آموزش نصب آنتن مرکزی
آموزش قرارداد نویسی و مدیریت قراردادها
آموزش موشن گرافیک
آموزش نرم افزار سپیدار
آموزش مدیریت مالی
آموزش حسابداری پیشرفته
آموزش حسابداری
آموزش برق صنعتی
آموزش کابینت سازی ام دی اف
آموزش کلید سازی و قفل سازی
آموزش برق ساختمان
آموزش جلوبندی سازی
آموزش نقاشی خودرو
آموزش سوزن دوزی
آموزش اکسس (Access)
آموزش مونتاژ کامپیوتر
آموزش اکسل (excel)
آموزش ورد (word)
آموزش امنیت شبکه
آموزش پسیو شبکه
آموزش اتوکد
آموزش ایندیزاین
آموزش 3D MAX
آموزش کورل
آموزش مکانیک خودرو
آموزش ایلوستریتور
آموزش انیمیشن سازی
آموزش افترافکت
آموزش پریمیر
آموزش طراحی سایت با وردپرس
آموزش میل بافی
آموزش PHP
آموزش برنامه نویسی تحت وب
آموزش HTML و CSS
آموزش بوت استرپ (Bootstarp)
آموزش ایجکس (ajax)
آموزش پایتون
آموزش ++C
آموزش برنامه نویسی اندروید
آموزش جاوا
آموزش خوشنویسی
آموزش نقاشی مدرن
آموزش نقاشی با گواش
آموزش نقاشی رنگ روغن
آموزش نقاشی اکریلیک
آموزش نقاشی
آموزش طراحی صحنه
آموزش دوبله
آموزش تابلو برق
آموزش کارگردانی تئاتر
آموزش گریم سینمایی
آموزش صدابرداری
آموزش تدوین
آموزش فیلمبرداری
آموزش عکاسی
آموزش ترمه بافی
آموزش تعمیرات لوازم خانگی
آموزش فتوشاپ (Photoshop)
آموزش سفالگری
آموزش جاجیم بافی
آموزش تعمیرات لباسشویی
آموزش تعمیرات یخچال
آموزش تعمیرات ماکروفر
آموزش سیم پیچی موتور
آموزش تعمیرات فتوکپی و پرینتر
آموزش تعمیرات فکس
آموزش تعمیرات لپ تاپ و کامپیوتر
آموزش تعمیرات دوربین مدار بسته و DVR
آموزش تعویض روغنی و آپاراتی
آموزش رباتیک
آموزش تعمیرات موتورسیکلت (موتور سازی)
آموزش تعمیرات اسکنر
آموزش تعمیرات ایسیو (ecu)
آموزش تعمیرات ظرفشویی
آموزش تعمیر قفل و شیشه بالابر
آموزش تعمیرات لوازم سرمایشی و گرمایشی
آموزش نصب آسانسور
آموزش طراحی برد
آموزش هوشمند سازی ساختمان (BMS)
آموزش تعمیرات دوچرخه
آموزش تعمیرات موبایل
آموزش تعمیر گیربکس خودرو
آموزش فیبر نوری
آموزش آلتیوم دیزاینر
آموزش تعمیرات برد
آموزش نصب ضبط و باند خودرو
آموزش تعویض گلس گوشی موبایل
آموزش آردوینو (Arduino)
آموزش تعمیرات انژکتور و دیاگ خودرو
آموزش نصب و تعمیر CNG و LPG خودرو
آموزش بازسازی و تعمیر خودروهای کلاسیک
آموزش تعمیر کولر خودرو و بخاری خودرو
آموزش ریمپ ایسیو خودرو
آموزش تعمیرات لوازم گازسوز
آموزش تاسیسات موتورخانه
آموزش تعمیرات ماشین های اداری
آموزش نرم افزار متلب
آموزش تعمیرات لوازم صوتی تصویری
آموزش سئو
آموزش تعمیرات قهوه ساز
آموزش ICDL درجه 2 و درجه 1
آموزش موشن گرافیک
آموزش مدیریت مالی
آموزش نرم افزار هلو
آموزش نرمافزار حسابداری سپیدار
آموزش حسابداری پیشرفته
آموزش قراردادنویسی و مدیریت قراردادها
آموزش پسیو شبکه
آموزش سیسکو (Cisco)
آموزش نقاشی
آموزش کمک حسابدار
آموزش حسابداری مالیاتی
آموزش کارگردانی تئاتر
آموزش طراحی صحنه
آموزش نمایشنامه و فیلمنامه نویسی
آموزش دوبله
آموزش نقاشی اکریلیک
آموزش مونتاژ کامپیوتر
آموزش نتورک پلاس
آموزش امنیت شبکه
آموزش نرم افزار Excel پیشرفته
آموزش نرم افزار word ( پیشرفته )
آموزش برنامه نویسی PHP
آموزش انیمیشن سازی با Swish Max
آموزش برنامه نویسی ایجکس
آموزش برنامه نویسی تحت وب
آموزش طراحی چهره
آموزش خوش نویسی
آموزش مینیاتور
آموزش نقاشی پاستل
آموزش نقاشی روی سفال
آموزش سیاه قلم
آموزش نقاشی با مداد رنگی
آموزش نقاشی آبرنگ
آموزش نقاشی مدرن
آموزش نقاشی با گواش
آموزش برنامه نویسی اندروید
آموزش نقاشی رنگ روغن
آموزش بوت استرپ
آموزش برنامه نویسی پایتون
آموزش برنامه نویسی جاوا
آموزش تدوین
آموزش برنامه نویسی ++c
آموزش سوزن دوزی
آموزش فیلم برداری
آموزش Corel Draw ( کورل دراو )
آموزش HTML 5 و CSS 3
آموزش قلاب بافی
آموزش 3D MAX
آموزش سفالگری
آموزش اتوکد ( AutoCAD)
آموزش ایندیزاین
آموزش نورپردازی
آموزش عکاسی
آموزش قالی بافی
آموزش میل بافی
آموزش گریم سینمایی
آموزش صدابرداری
آموزش کارشناسی رنگ خودرو
آموزش ترمه دوزی
آموزش ایلوستریتور (Illustrator)
آموزش چرم دوزی
آموزش جاجیم بافی
آموزش حصیر بافی
آموزش گلیم بافی
آموزش باریستا
آموزش تعویض گلس گوشی
آموزش رباتیک
آموزش نصب و تعمیر CNG و LPG (سیستم گازسوز) خودرو
آموزش برق صنعتی
آموزش طراحی سایت با وردپرس
آموزش سئو سایت
آموزش ریمپ ایسیو خودرو (ECU remaping)
آموزش کلید سازی و قفل سازی
آموزش تعمیرات پکیج
آموزش کابینت سازی
آموزش بازسازی و تعمیر خودروهای کلاسیک
آموزش لوله کشی ساختمان
آموزش تعمیرات کولر خودرو و بخاری خودرو
آموزش نصب و تعمیرات تاسیسات موتورخانه
آموزش تعمیرات دوچرخه
آموزش کافی شاپ
آموزش تعمیرات ایسیو خودرو سنگین
آموزش پریمیر
آموزش افترافکت After Effects
آموزش ICDL درجه 2 و درجه 1
آموزش فتوشاپ (Photoshop)
آموزش صافکاری خودرو و آموزش صافکاری pdr
آموزش انژکتور و دیاگ خودرو
آموزش تعمیر اگزوز خودرو
آموزش نقاشی خودرو
آموزش مکانیک خودرو
آموزش گیربکس اتوماتیک و دستی
آموزش تعمیرات قفل خودرو و شیشه بالابر خودرو
آموزش تعمیرات موتور سیکلت
آموزش تعویض روغنی و آپاراتی خودرو
آموزش جلوبندی ماشین
آموزش برق خودرو
آموزش PLC (پی ال سی)
آموزش تعمیرات موبایل
آموزش تعمیرات ساعت
آموزش نرم افزار دیالوکس (DIALux)
آموزش نرم افزار EPLAN ELECTRIC
آموزش نرم افزار متلب
آموزش نرم افزار آلتیوم دیزاینر (ALTIUM DESIGNER)
آموزش نصب آسانسور
آموزش فیبر نوری
آموزش نصب آنتن مرکزی
آموزش نصب پنل خورشیدی
آموزش نصب ضبط و باند خودرو
آموزش نصب دزدگیر ماشین
آموزش نصب آیفون تصویری و صوتی
آموزش تعمیرات یخچال
آموزش تعمیرات ماشین لباسشویی
آموزش تعمیرات اسکنر
آموزش تعمیرات لوازم صوتی و تصویری
آموزش تعمیرات پرینتر
آموزش تعمیرات ماشین های اداری
آموزش تعمیرات کولر گازی
آموزش تعمیرات قهوه ساز
آموزش تعمیرات فتوکپی
آموزش تعمیرات فکس
آموزش تعمیرات ماشین ظرفشویی
آموزش تعمیرات ماکروویو و سولاردوم
آموزش تعمیرات لوازم سرمایشی و گرمایشی
آموزش تعمیرات لوازم گازسوز
آموزش تعمیرات دوربین مدار بسته
آموزش نصب پکیج دیواری
آموزش برنامه نویسی میکروکنترلر PIC
آموزش آردوینو
آموزش هوشمند سازی ساختمان
آموزش نصب کولر گازی (اسپلیت)
آموزش نصب کرکره برقی
آموزش نصب سانترال
آموزش نصب دوربین مدار بسته
آموزش نصب دزدگیر اماکن
آموزش نصب درب اتوماتیک شیشه ای
آموزش نصب جک برقی
آموزش نصب اعلام حریق
آموزش مهندسی معکوس بردهای الکترونیک
آموزش طراحی و ساخت برد الکترونیکی
آموزش سیم پیچی موتور
آموزش ساخت تابلو روان
آموزش تعمیرات لوازم خانگی
آموزش تعمیرات لپ تاپ
آموزش تعمیرات برد الکترونیکی
آموزش تعمیرات ایسیو
آموزش تابلو برق صنعتی
آموزش اتوماسیون صنعتی
آموزش برق ساختمان
Hey There. I found your blog using msn. This is a really well written article.
I will make sure to bookmark it and come back to
read more of your useful information. Thanks for the post.
I'll definitely return.
Link exchange is nothing else except it is only placing the other person's website
link on your page at appropriate place and other person will also
do similar in favor of you.
This information is invaluable. How can I find out more?
Thanks for the good writeup. It in reality was a enjoyment
account it. Look complicated to more introduced agreeable from you!
By the way, how could we be in contact?
I'm gone to convey my little brother, that he should also
pay a visit this website on regular basis to obtain updated from latest news
update.
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
https://www.reddit.com/user/Prediks...
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Prediksi Jeeptoto
Hi it's me, I am also visiting this web site regularly, this web page is actually good and the visitors are in fact sharing fastidious thoughts.
If you desire to increase your experience only keep visiting this web site and be
updated with the most recent information posted here.
payday loan
payday loan
Everything is very open with a precise description of the challenges.
It was definitely informative. Your site is very useful.
Thanks for sharing!
What i do not realize is actually how you are now not actually a lot more smartly-favored than you may be now.
You are very intelligent. You recognize thus considerably in the
case of this subject, produced me personally believe it from so many various angles.
Its like men and women are not fascinated until it is something to do with Lady gaga!
Your individual stuffs excellent. All the time deal with it up!
I think this is one of the most significant info for me.
And i'm glad reading your article. But should
remark on some general things, The web site style is ideal, the articles is really great : D.
Good job, cheers
I am truly grateful to the owner of this web site who has shared this fantastic paragraph at at this
place.
https://fanamoozanisfahan.com/elect...
https://fanamoozanisfahan.com/benef...
https://fanamoozanisfahan.com/types...
https://fanamoozanisfahan.com/robot...
https://fanamoozanisfahan.com/types...
https://fanamoozanisfahan.com/best-...
https://fanamoozanisfahan.com/tools...
https://fanamoozanisfahan.com/car-e...
https://fanamoozanisfahan.com/ecu-c...
https://fanamoozanisfahan.com/car-i...
https://fanamoozanisfahan.com/car-d...
https://fanamoozanisfahan.com/car-e...
https://fanamoozanisfahan.com/air-c...
https://fanamoozanisfahan.com/best-...
https://fanamoozanisfahan.com/what-...
https://fanamoozanisfahan.com/elect...
https://fanamoozanisfahan.com/car-a...
https://fanamoozanisfahan.com/refri...
https://fanamoozanisfahan.com/tools...
https://fanamoozanisfahan.com/under...
https://fanamoozanisfahan.com/smart...
https://fanamoozanisfahan.com/car-t...
https://fanamoozanisfahan.com/best-...
https://fanamoozanisfahan.com/visua...
https://fanamoozanisfahan.com/cabin...
https://fanamoozanisfahan.com/high-...
https://fanamoozanisfahan.com/home-...
https://fanamoozanisfahan.com/best-...
https://fanamoozanisfahan.com/mobil...
https://fanamoozanisfahan.com/onlin...
https://fanamoozanisfahan.com/self-...
https://fanamoozanisfahan.com/techn...
https://fanamoozanisfahan.com/techn...
https://fanamoozanisfahan.com/immig...
https://fanamoozanisfahan.com/car-s...
https://fanamoozanisfahan.com/car-r...
https://fanamoozanisfahan.com/commo...
https://fanamoozanisfahan.com/
https://fanamoozanisfahan.com/tuiti...
https://fanamoozanisfahan.com/sched...
https://fanamoozanisfahan.com/about...
https://fanamoozanisfahan.com/regis...
https://fanamoozanisfahan.com/conta...
https://fanamoozanisfahan.com/blog/
https://fanamoozanisfahan.com/coope...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
https://fanamoozanisfahan.com/cours...
This is a topic that's near to my heart... Many thanks!
Exactly where are your contact details though?
We stumbled over here coming from a different web page and thought I might check things out.
I like what I see so i am just following you. Look forward
to looking at your web page yet again.
I pay a visit day-to-day some blogs and blogs
to read posts, but this web site presents feature based writing.
Hi, I do believe this is a great web site. I stumbledupon it ;
) I am going to revisit once again since I book marked it.
Money and freedom is the best way to change, may you
be rich and continue to help other people.
penis enlargement
Excellent post. I was checking constantly this blog and I'm
 I care for such information a lot. I was seeking this
I care for such information a lot. I was seeking this
impressed! Extremely useful information specially the last part
certain info for a very long time. Thank you and good luck.
Ahaa, its nice discussion about this article at this place
at this webpage, I have read all that, so now me also commenting
here.
It's truly a great and helpful piece of information.
I am glad that you simply shared this useful info with us. Please stay us
informed like this. Thank you for sharing.
Hmm it looks like your website ate my first comment (it was extremely long)
so I guess I'll just sum it up what I had
written and say, I'm thoroughly enjoying your blog.
I as well am an aspiring blog blogger but I'm still new to the whole thing.
Do you have any tips for rookie blog writers? I'd certainly appreciate it.
Hi, after reading this awesome paragraph i am too delighted to share my
know-how here with friends.
Terrific article! That is the kind of info that are
meant to be shared around the internet. Disgrace
on the search engines for no longer positioning this put
up higher! Come on over and visit my web site .
Thank you =)
Excellent weblog right here! Additionally your web site
so much up fast! What web host are you the usage of? Can I am getting your
associate link in your host? I desire my web site loaded up as quickly
as yours lol
https://heylink.me/pasang4d-login/
https://mez.ink/loginpasang4d
Woah! I'm really loving the template/theme of this website.
It's simple, yet effective. A lot of times it's very difficult to get that "perfect balance"
between user friendliness and appearance. I must say you have done a amazing job with this.
Additionally, the blog loads super quick for me on Chrome. Excellent Blog!
I am regular visitor, how are you everybody?
This post posted at this website is truly pleasant.
https://fanokar.com/electricians-bu...
https://fanokar.com/tools-required-...
https://fanokar.com/car-mechanic-jo...
https://fanokar.com/essential-elect...
https://fanokar.com/labor-market-an...
https://fanokar.com/building-electr...
https://fanokar.com/car-painting-jo...
https://fanokar.com/car-electrical-...
https://fanokar.com/%d8%a8%d8%a7%d8...
https://fanokar.com/motorcycle-repa...
https://fanokar.com/car-smoothing/
https://fanokar.com/building-electr...
https://fanokar.com/repair-electron...
https://fanokar.com/plc-job/
https://fanokar.com/high-income-tec...
https://fanokar.com/remove-backgrou...
https://fanokar.com/usage-photoshop...
https://fanokar.com/motorcycle-cand...
https://fanokar.com/peugeot-cylinde...
https://fanokar.com/car-polishing/
https://fanokar.com/motorcycle-cool...
https://fanokar.com/types-of-brakin...
https://fanokar.com/ecu-%d8%ae%d9%8...
https://fanokar.com/engine-engine-o...
https://fanokar.com/rip-the-motorcy...
https://fanokar.com/how-to-measure-...
https://fanokar.com/diode-test/
https://fanokar.com/building-electr...
https://fanokar.com/installing-a-cc...
https://fanokar.com/electronic-fuse...
https://fanokar.com/setting-remote-...
https://fanokar.com/the-most-widely...
https://fanokar.com/elevator-contro...
https://fanokar.com/shutting-down-t...
https://fanokar.com/electronic-boar...
https://fanokar.com/types-of-buildi...
https://fanokar.com/cctv-cabling/
https://fanokar.com/communication-b...
https://fanokar.com/tools-needed-fo...
https://fanokar.com/what-is-a-micro...
https://fanokar.com/industrial-netw...
https://fanokar.com/plc-incremental...
https://fanokar.com/cameras/
https://fanokar.com/%da%86%da%af%d9...
https://fanokar.com/oven/
https://fanokar.com/%d8%a8%d8%b1%d8...
https://fanokar.com/plc/
https://fanokar.com/%d8%b3%db%8c%d8...
https://fanokar.com/%d8%a8%d8%a7%d8...
https://fanokar.com/plc-software-co...
https://fanokar.com/resistor-types/
https://fanokar.com/network-socket-...
https://fanokar.com/power-pressure-...
https://fanokar.com/plc-brands/
https://fanokar.com/electric-shutte...
https://fanokar.com/cctv-star-visio...
https://fanokar.com/cctv-install-jo...
https://fanokar.com/cctv-installer/
https://fanokar.com/fire-alarm-syst...
https://fanokar.com/wall-mount-job/
https://fanokar.com/smart-socket/
https://fanokar.com/computer-repair...
https://fanokar.com/package-fan/
https://fanokar.com/samsung-washing...
https://fanokar.com/the-reason-for-...
https://fanokar.com/features-of-iph...
https://fanokar.com/phone-battery-f...
https://fanokar.com/mobile-ic-templ...
https://fanokar.com/mobile-repair-j...
https://fanokar.com/xiaomi-note-8-c...
https://fanokar.com/board-electroni...
https://fanokar.com/iphone-13-capab...
https://fanokar.com/washing-machine...
https://fanokar.com/xiaomi-or-samsu...
https://fanokar.com/telegram-web/
https://fanokar.com/poco-m3-flux-so...
https://fanokar.com/%d8%aa%d8%b9%d9...
https://fanokar.com/how-to-repair-a...
https://fanokar.com/oven-thermal-fu...
https://fanokar.com/%d8%a8%d8%a7%db...
https://fanokar.com/%d9%85%d8%a7%d8...
https://fanokar.com/%da%86%da%af%d9...
https://fanokar.com/yakhsaz/
https://fanokar.com/galaxy-s8/
https://fanokar.com/%d8%a8%d8%b1%d8...
https://fanokar.com/enter-job/
https://fanokar.com/%d8%a8%d8%b1%d8...
https://fanokar.com/%d9%86%d8%ad%d9...
https://fanokar.com/voltage-fluctua...
https://fanokar.com/repair-charger/
https://fanokar.com/%d9%86%d8%ad%d9...
https://fanokar.com/%d9%86%d8%ad%d9...
https://fanokar.com/%d9%86%d8%ad%d9...
https://fanokar.com/%d9%86%d8%ad%d9...
https://fanokar.com/%d8%a8%d8%b1%d8...
https://fanokar.com/%d9%86%d8%ad%d9...
https://fanokar.com/repair-maintena...
https://fanokar.com/%d8%aa%d8%b9%d9...
https://fanokar.com/%d8%aa%d8%b9%d9...
https://fanokar.com/%d9%86%d8%ad%d9...
https://fanokar.com/%d8%a2%d9%85%d9...
https://fanokar.com/laptop-repairs/
https://fanokar.com/air-conditioner...
https://fanokar.com/box-dongle/
https://fanokar.com/repair-mobile-j...
https://fanokar.com/repair-mobile-c...
https://fanokar.com/speaker-andriod...
https://fanokar.com/printer-2/
https://fanokar.com/fer-kenmor/
https://fanokar.com/types-of-key-ma...
https://fanokar.com/jobs-related-to...
https://fanokar.com/web-site-design...
https://fanokar.com/copper-cylinder...
https://fanokar.com/car-engine-fing...
https://fanokar.com/hidden-cctv-cam...
https://fanokar.com/electric-motor-...
https://fanokar.com/car-engine-over...
https://fanokar.com/home-appliance-...
https://fanokar.com/%d8%b9%d9%84%d8...
https://fanokar.com/%d8%b3%d9%84%d9...
https://fanokar.com/osi-model/
https://fanokar.com/%d9%86%d9%85%d9...
https://fanokar.com/%d9%86%d8%ad%d9...
https://fanokar.com/%d8%a2%d9%85%d9...
https://fanokar.com/wall-hung-boile...
https://fanokar.com/common-scanner-...
https://fanokar.com/ip-and-analog-c...
https://fanokar.com/engine-winding-...
https://fanokar.com/how-to-work-wit...
https://fanokar.com/mobile-rom/
https://fanokar.com/types-of-fiber-...
https://fanokar.com/puncture-of-car...
https://fanokar.com/install-cctv-jo...
https://fanokar.com/%d9%86%d8%ad%d9...
https://fanokar.com/all-kinds-of-ca...
https://fanokar.com/refrigerator-te...
https://fanokar.com/timing-belt/
https://fanokar.com/refrigerator-ga...
https://fanokar.com/iphone-12-probl...
https://fanokar.com/cabinet-design-...
https://fanokar.com/traditional-pol...
https://fanokar.com/mobile-ic-ribal...
https://fanokar.com/winding-of-sing...
https://fanokar.com/blc-hlc-cctv/
https://fanokar.com/ic-programmer-d...
https://fanokar.com/washing-machine...
https://fanokar.com/pdr-smoothing-t...
https://fanokar.com/fani-herfeyi-de...
https://fanokar.com/types-of-keys/
https://fanokar.com/difference-betw...
https://fanokar.com/printer/
https://fanokar.com/wireless-home-s...
https://fanokar.com/how-to-fill-a-m...
https://fanokar.com/oven-toaster/
https://fanokar.com/burglar-alarm/
https://fanokar.com/cell-phone-repa...
https://fanokar.com/mobile-parts/
https://fanokar.com/car-steering-sy...
https://fanokar.com/description-of-...
https://fanokar.com/star-and-delta-...
https://fanokar.com/application-of-...
https://fanokar.com/fusion-device-p...
https://fanokar.com/mechanical-part...
https://fanokar.com/riser/
https://fanokar.com/application-of-...
https://fanokar.com/contactors-used...
https://fanokar.com/ecu-tester/
https://fanokar.com/types-of-car-ec...
https://fanokar.com/common-car-ecu-...
https://fanokar.com/differences-bet...
https://fanokar.com/ecu-sensors/
https://fanokar.com/led-moving-sign...
https://fanokar.com/types-of-electr...
https://fanokar.com/how-ac-and-spli...
https://fanokar.com/the-best-place-...
https://fanokar.com/the-cause-of-bo...
https://fanokar.com/common-defects-...
https://fanokar.com/building-plumbi...
https://fanokar.com/the-difference-...
https://fanokar.com/board-boiler/
https://fanokar.com/tools-for-build...
https://fanokar.com/gas-cooler-repa...
https://fanokar.com/boiler-converte...
https://fanokar.com/%d9%86%d8%ad%d9...
https://fanokar.com/%d9%86%d8%ad%d9...
https://fanokar.com/gas-cooler-soun...
https://fanokar.com/package-errors/
https://fanokar.com/explosive-light...
https://fanokar.com/package-heat-ex...
https://fanokar.com/gas-cooler-cabl...
https://fanokar.com/gas-cooler-fan/
https://fanokar.com/package-fan-fai...
https://fanokar.com/air-conditioner...
https://fanokar.com/package-water/
https://fanokar.com/heat-exchanger-...
https://fanokar.com/package-install...
https://fanokar.com/package-repairm...
https://fanokar.com/washing-the-air...
https://fanokar.com/flow-switch-pac...
https://fanokar.com/package-install...
https://fanokar.com/air-conditioner...
https://fanokar.com/hot-air-conditi...
https://fanokar.com/high-noise-of-c...
https://fanokar.com/multiplex-syste...
https://fanokar.com/why-car-not-sta...
https://fanokar.com/symptoms-of-car...
https://fanokar.com/difference-betw...
https://fanokar.com/car-battery-rep...
https://fanokar.com/burning-car-wir...
https://fanokar.com/all-types-of-ca...
https://fanokar.com/car-alternator-...
https://fanokar.com/cars-ecu-and-co...
https://fanokar.com/car-alternator-...
https://fanokar.com/folding-electri...
https://fanokar.com/the-car-does-no...
https://fanokar.com/weakening-car-l...
https://fanokar.com/%d8%b9%d9%84%d8...
https://fanokar.com/%da%86%d8%b4%d9...
https://fanokar.com/car-wiring-repa...
https://fanokar.com/%d9%85%d8%b9%d8...
https://fanokar.com/%d8%aa%d8%b9%d9...
https://fanokar.com/
https://fanokar.com/karamoozi/forms...
https://fanokar.com/contact-us/
https://fanokar.com/abouts-us/
https://fanokar.com/%d9%be%db%8c%d8...
https://fanokar.com/enmad/
https://fanokar.com/karamoozi/
https://fanokar.com/%d9%82%d9%88%d8...
https://fanokar.com/course-prise/
https://fanokar.com/blog/
https://fanokar.com/skills/
https://fanokar.com/skills/computer...
https://fanokar.com/skills/ecu-fix-...
https://fanokar.com/skills/plc-tuto...
https://fanokar.com/skills/switchbo...
https://fanokar.com/skills/eplan-tu...
https://fanokar.com/skills/elevator...
https://fanokar.com/skills/electron...
https://fanokar.com/skills/robotics...
https://fanokar.com/skills/arduino-...
https://fanokar.com/skills/altium-d...
https://fanokar.com/skills/solar-el...
https://fanokar.com/skills/automati...
https://fanokar.com/skills/bms-tuto...
https://fanokar.com/skills/building...
https://fanokar.com/skills/electric...
https://fanokar.com/skills/fire-ala...
https://fanokar.com/skills/cctv-ins...
https://fanokar.com/skills/electric...
https://fanokar.com/skills/alarm-in...
https://fanokar.com/skills/fax-fix-...
https://fanokar.com/skills/scanner-...
https://fanokar.com/skills/printer-...
https://fanokar.com/skills/cctv-fix...
https://fanokar.com/skills/coffee-m...
https://fanokar.com/skills/dishwash...
https://fanokar.com/skills/washing-...
https://fanokar.com/skills/office-m...
https://fanokar.com/skills/copyer-f...
https://fanokar.com/skills/air-cond...
https://fanokar.com/skills/ac-insta...
https://fanokar.com/skills/plumbing...
https://fanokar.com/skills/boiler-i...
https://fanokar.com/skills/mechnica...
https://fanokar.com/skills/confecti...
https://fanokar.com/skills/coffee-s...
https://fanokar.com/skills/car-oil-...
https://fanokar.com/skills/auto-det...
https://fanokar.com/skills/car-mech...
https://fanokar.com/skills/car-pain...
https://fanokar.com/skills/bicycle-...
https://fanokar.com/skills/gearbox-...
https://fanokar.com/skills/car-audi...
https://fanokar.com/skills/car-susp...
https://fanokar.com/skills/car-lock...
https://fanokar.com/skills/car-alar...
https://fanokar.com/skills/leather-...
https://fanokar.com/skills/needlewo...
https://fanokar.com/skills/termeh-w...
https://fanokar.com/skills/kilim-te...
https://fanokar.com/skills/crochet-...
https://fanokar.com/skills/jajim-we...
https://fanokar.com/skills/pottery-...
https://fanokar.com/skills/holoo-so...
https://fanokar.com/skills/contract...
https://fanokar.com/skills/financia...
https://fanokar.com/skills/accounti...
https://fanokar.com/skills/python-t...
https://fanokar.com/skills/premiere...
https://fanokar.com/skills/ajax-and...
https://fanokar.com/skills/cpp-tuto...
https://fanokar.com/skills/animatio...
https://fanokar.com/skills/php-and-...
https://fanokar.com/skills/html-css...
https://fanokar.com/skills/coreldra...
https://fanokar.com/skills/3ds-max-...
https://fanokar.com/skills/javascri...
https://fanokar.com/skills/indesign...
https://fanokar.com/skills/motion-g...
https://fanokar.com/skills/excel-tu...
https://fanokar.com/skills/digital-...
https://fanokar.com/skills/adobe-il...
https://fanokar.com/skills/android-...
https://fanokar.com/skills/autocad-...
https://fanokar.com/skills/icdl-tut...
https://fanokar.com/skills/wordpres...
https://fanokar.com/skills/network-...
https://fanokar.com/skills/network-...
https://fanokar.com/skills/passive-...
https://fanokar.com/skills/cisco-tu...
https://fanokar.com/skills/mikrotik...
https://fanokar.com/skills/optical-...
https://fanokar.com/skills/pbx-tuto...
https://fanokar.com/skills/portrait...
https://fanokar.com/skills/dubbing-...
https://fanokar.com/skills/playwrit...
https://fanokar.com/skills/theatre-...
https://fanokar.com/skills/scenic-d...
https://fanokar.com/skills/acting-t...
https://fanokar.com/skills/lighting...
https://fanokar.com/skills/miniatur...
https://fanokar.com/skills/screenwr...
https://fanokar.com/skills/chiarosc...
https://fanokar.com/skills/cinemati...
https://fanokar.com/skills/film-edi...
https://fanokar.com/skills/cinemato...
https://fanokar.com/skills/photogra...
https://fanokar.com/skills/weld-ins...
https://fanokar.com/skills/carpentr...
https://fanokar.com/skills/locksmit...
https://fanokar.com/skills/cabinet-...
https://fanokar.com/skills/seo-tuto...
https://fanokar.com/skills/microwav...
https://fanokar.com/skills/sepidar-...
https://fanokar.com/skills/co2-weld...
https://fanokar.com/skills/cake-bak...
https://fanokar.com/skills/mobile-f...
https://fanokar.com/skills/photosho...
https://fanokar.com/skills/after-ef...
https://fanokar.com/skills/car-pain...
https://fanokar.com/skills/refriger...
https://fanokar.com/skills/motorcyc...
https://fanokar.com/skills/pc-and-l...
https://fanokar.com/skills/mat-weav...
https://fanokar.com/skills/carpet-w...
https://fanokar.com/skills/clock-fi...
https://fanokar.com/skills/door-pho...
https://fanokar.com/skills/pdr-tuto...
https://fanokar.com/skills/paint-on...
https://fanokar.com/skills/wall-boi...
https://fanokar.com/skills/knitting...
https://fanokar.com/skills/matv-ins...
https://fanokar.com/skills/accounti...
https://fanokar.com/skills/tax-acco...
https://fanokar.com/skills/audio-re...
https://fanokar.com/skills/calligra...
https://fanokar.com/skills/home-app...
https://fanokar.com/skills/motor-wi...
https://fanokar.com/skills/industri...
https://fanokar.com/skills/pastel-t...
https://fanokar.com/skills/led-matr...
https://fanokar.com/skills/smaw-tut...
https://fanokar.com/skills/printed-...
https://fanokar.com/skills/finger-f...
https://fanokar.com/skills/oil-pain...
https://fanokar.com/skills/exhaust-...
https://fanokar.com/skills/car-elec...
https://fanokar.com/category/busine...
https://fanokar.com/category/it-art...
https://fanokar.com/category/car-re...
https://fanokar.com/category/electr...
https://fanokar.com/category/instal...
https://fanokar.com/category/repair...
https://fanokar.com/category/techni...
https://fanokar.com/skill-cat/autom...
https://fanokar.com/skill-cat/elect...
https://fanokar.com/skill-cat/elect...
https://fanokar.com/skill-cat/repai...
https://fanokar.com/skill-cat/elect...
https://fanokar.com/skill-cat/facil...
https://fanokar.com/skill-cat/cerem...
https://fanokar.com/skill-cat/auto-...
https://fanokar.com/skill-cat/handi...
https://fanokar.com/skill-cat/finan...
https://fanokar.com/skill-cat/infor...
https://fanokar.com/skill-cat/commu...
https://fanokar.com/skill-cat/art/
https://fanokar.com/skill-cat/profi...
This paragraph is truly a nice one it assists new the web people,
who are wishing for blogging.
I seriously love your website.. Very nice colors & theme.
Did you develop this web site yourself? Please reply back as I'm hoping
to create my own personal website and would like to know where you got this from or just what
the theme is named. Thanks!
http://sparbote.digidip.net/visit?u...
The actual content of the business plan will vary
depending on the character and complexity of
the enterprise, the stage of development and the kind of financing
wanted.
You ought to take part in a contest for one of the finest blogs online.
I most certainly will highly recommend this site!
I have fun with, cause I found just what I used to be looking for.
You have ended my four day long hunt! God Bless you
man. Have a great day. Bye
Yes! Finally someone writes about https://maisonarchitecture-centre.f...
Wow! At last I got a weblog from where I be able to in fact get useful
data concerning my study and knowledge.
Attractive section of content. I just stumbled upon your blog and in accession capital to assert that I acquire actually loved
account your weblog posts. Any way I will be subscribing to your augment or even I achievement you get right of entry to persistently rapidly.
Wonderful goods from you, man. I have remember your stuff prior to and you're
simply extremely great. I actually like what you have bought right here,
certainly like what you're saying and the way wherein you assert it.
You make it entertaining and you still care for to stay it smart.
I cant wait to learn much more from you. This is actually a terrific web site.
I visited multiple sites however the audio quality for audio
songs present at this site is truly fabulous.
Heya excellent website! Does running a blog like this take a lot of work?
I've no expertise in coding however I was hoping to start my
own blog in the near future. Anyways, if you have any suggestions or tips for new blog owners please share.
I understand this is off topic nevertheless I simply wanted to ask.
Cheers!
We absolutely love your blog and find almost all of your post's to be just what I'm
looking for. Would you offer guest writers to write content for yourself?
I wouldn't mind creating a post or elaborating on a lot of the subjects you
write with regards to here. Again, awesome web
site!
https://paytakhtfanavari.com/blog/
https://paytakhtfanavari.com/electr...
https://paytakhtfanavari.com/solve-...
https://paytakhtfanavari.com/tools-...
https://paytakhtfanavari.com/washin...
https://paytakhtfanavari.com/virtua...
https://paytakhtfanavari.com/car-mo...
https://paytakhtfanavari.com/what-f...
https://paytakhtfanavari.com/mobile...
https://paytakhtfanavari.com/why-ph...
https://paytakhtfanavari.com/portab...
https://paytakhtfanavari.com/instal...
https://paytakhtfanavari.com/packag...
https://paytakhtfanavari.com/wall-h...
https://paytakhtfanavari.com/motorc...
https://paytakhtfanavari.com/best-j...
https://paytakhtfanavari.com/car-no...
https://paytakhtfanavari.com/cause-...
https://paytakhtfanavari.com/stereo...
https://paytakhtfanavari.com/when-t...
https://paytakhtfanavari.com/electr...
https://paytakhtfanavari.com/coffee...
https://paytakhtfanavari.com/ac-wor...
https://paytakhtfanavari.com/buildi...
https://paytakhtfanavari.com/car-re...
https://paytakhtfanavari.com/remove...
https://paytakhtfanavari.com/%d8%a7...
https://paytakhtfanavari.com/plc-jo...
https://paytakhtfanavari.com/varist...
https://paytakhtfanavari.com/dc-ele...
https://paytakhtfanavari.com/double...
https://paytakhtfanavari.com/type-o...
https://paytakhtfanavari.com/repair...
https://paytakhtfanavari.com/2-stro...
https://paytakhtfanavari.com/induct...
https://paytakhtfanavari.com/capaci...
https://paytakhtfanavari.com/electr...
https://paytakhtfanavari.com/electr...
https://paytakhtfanavari.com/armatu...
https://paytakhtfanavari.com/how-to...
https://paytakhtfanavari.com/what-i...
https://paytakhtfanavari.com/securi...
https://paytakhtfanavari.com/photoc...
https://paytakhtfanavari.com/commut...
https://paytakhtfanavari.com/why-ca...
https://paytakhtfanavari.com/failin...
https://paytakhtfanavari.com/failur...
https://paytakhtfanavari.com/water-...
https://paytakhtfanavari.com/car-bu...
https://paytakhtfanavari.com/assemb...
https://paytakhtfanavari.com/transf...
https://paytakhtfanavari.com/car-sp...
https://paytakhtfanavari.com/coffee...
https://paytakhtfanavari.com/constr...
https://paytakhtfanavari.com/boiler...
https://paytakhtfanavari.com/washin...
https://paytakhtfanavari.com/errors...
https://paytakhtfanavari.com/%d9%86...
https://paytakhtfanavari.com/air-co...
https://paytakhtfanavari.com/instal...
https://paytakhtfanavari.com/washin...
https://paytakhtfanavari.com/hot-ai...
https://paytakhtfanavari.com/home-a...
https://paytakhtfanavari.com/micros...
https://paytakhtfanavari.com/mobile...
https://paytakhtfanavari.com/buildi...
https://paytakhtfanavari.com/single...
https://paytakhtfanavari.com/buildi...
https://paytakhtfanavari.com/car-bo...
https://paytakhtfanavari.com/using-...
https://paytakhtfanavari.com/car-mo...
https://paytakhtfanavari.com/what-c...
https://paytakhtfanavari.com/reduce...
https://paytakhtfanavari.com/%d9%86...
https://paytakhtfanavari.com/dishwa...
https://paytakhtfanavari.com/dishwa...
https://paytakhtfanavari.com/plc-pr...
https://paytakhtfanavari.com/reason...
https://paytakhtfanavari.com/%d8%a8...
https://paytakhtfanavari.com/car-pa...
https://paytakhtfanavari.com/peugeo...
https://paytakhtfanavari.com/why-ca...
https://paytakhtfanavari.com/sms-pr...
https://paytakhtfanavari.com/car-fu...
https://paytakhtfanavari.com/what-i...
https://paytakhtfanavari.com/how-to...
https://paytakhtfanavari.com/air-co...
https://paytakhtfanavari.com/instal...
https://paytakhtfanavari.com/%d9%86...
https://paytakhtfanavari.com/how-to...
https://paytakhtfanavari.com/car-ba...
https://paytakhtfanavari.com/refrig...
https://paytakhtfanavari.com/how-to...
https://paytakhtfanavari.com/motorc...
https://paytakhtfanavari.com/coffee...
https://paytakhtfanavari.com/solder...
https://paytakhtfanavari.com/how-to...
https://paytakhtfanavari.com/lg-dis...
https://paytakhtfanavari.com/place-...
https://paytakhtfanavari.com/how-to...
https://paytakhtfanavari.com/%d8%a2...
https://paytakhtfanavari.com/assemb...
https://paytakhtfanavari.com/gas-co...
https://paytakhtfanavari.com/princi...
https://paytakhtfanavari.com/window...
https://paytakhtfanavari.com/air-co...
https://paytakhtfanavari.com/repair...
https://paytakhtfanavari.com/ert-el...
https://paytakhtfanavari.com/car-al...
https://paytakhtfanavari.com/%d8%a2...
https://paytakhtfanavari.com/smart-...
https://paytakhtfanavari.com/%d8%aa...
https://paytakhtfanavari.com/buildi...
https://paytakhtfanavari.com/cyber-...
https://paytakhtfanavari.com/%d8%af...
https://paytakhtfanavari.com/plc-so...
https://paytakhtfanavari.com/evapor...
https://paytakhtfanavari.com/open-c...
https://paytakhtfanavari.com/lightn...
https://paytakhtfanavari.com/differ...
https://paytakhtfanavari.com/check-...
https://paytakhtfanavari.com/electr...
https://paytakhtfanavari.com/car-hy...
https://paytakhtfanavari.com/what-i...
https://paytakhtfanavari.com/car-se...
https://paytakhtfanavari.com/auto-b...
https://paytakhtfanavari.com/car-pa...
https://paytakhtfanavari.com/auto-b...
https://paytakhtfanavari.com/four-e...
https://paytakhtfanavari.com/stair-...
https://paytakhtfanavari.com/two-wa...
https://paytakhtfanavari.com/power-...
https://paytakhtfanavari.com/samsun...
https://paytakhtfanavari.com/lg-was...
https://paytakhtfanavari.com/samsun...
https://paytakhtfanavari.com/%d8%a7...
https://paytakhtfanavari.com/noise-...
https://paytakhtfanavari.com/horizo...
https://paytakhtfanavari.com/engine...
https://paytakhtfanavari.com/highly...
https://paytakhtfanavari.com/%d8%af...
https://paytakhtfanavari.com/car-al...
https://paytakhtfanavari.com/car-sw...
https://paytakhtfanavari.com/best-j...
https://paytakhtfanavari.com/%d8%b9...
https://paytakhtfanavari.com/wall-h...
https://paytakhtfanavari.com/%da%86...
https://paytakhtfanavari.com/pros-c...
https://paytakhtfanavari.com/fiber-...
https://paytakhtfanavari.com/plumbi...
https://paytakhtfanavari.com/differ...
https://paytakhtfanavari.com/espres...
https://paytakhtfanavari.com/differ...
https://paytakhtfanavari.com/fix-sa...
https://paytakhtfanavari.com/fire-a...
https://paytakhtfanavari.com/mobile...
https://paytakhtfanavari.com/cabine...
https://paytakhtfanavari.com/detect...
https://paytakhtfanavari.com/basic-...
https://paytakhtfanavari.com/siemen...
https://paytakhtfanavari.com/bms-jo...
https://paytakhtfanavari.com/charge...
https://paytakhtfanavari.com/car-di...
https://paytakhtfanavari.com/androi...
https://paytakhtfanavari.com/gudgeo...
https://paytakhtfanavari.com/microc...
https://paytakhtfanavari.com/plc-ha...
https://paytakhtfanavari.com/manito...
https://paytakhtfanavari.com/car-sp...
https://paytakhtfanavari.com/differ...
https://paytakhtfanavari.com/8-reas...
https://paytakhtfanavari.com/pcb-tr...
https://paytakhtfanavari.com/radiat...
https://paytakhtfanavari.com/car-ba...
https://paytakhtfanavari.com/%d9%86...
https://paytakhtfanavari.com/%d8%a2...
https://paytakhtfanavari.com/%d8%ba...
https://paytakhtfanavari.com/%da%86...
https://paytakhtfanavari.com/plc-%d...
https://paytakhtfanavari.com/fire-a...
https://paytakhtfanavari.com/smart-...
https://paytakhtfanavari.com/%d8%af...
https://paytakhtfanavari.com/washin...
https://paytakhtfanavari.com/reason...
https://paytakhtfanavari.com/repair...
https://paytakhtfanavari.com/loud-r...
https://paytakhtfanavari.com/washin...
https://paytakhtfanavari.com/star-d...
https://paytakhtfanavari.com/three-...
https://paytakhtfanavari.com/robot-...
https://paytakhtfanavari.com/buildi...
https://paytakhtfanavari.com/hydrau...
https://paytakhtfanavari.com/finger...
https://paytakhtfanavari.com/open-a...
https://paytakhtfanavari.com/riser/
https://paytakhtfanavari.com/refrig...
https://paytakhtfanavari.com/car-ex...
https://paytakhtfanavari.com/front-...
https://paytakhtfanavari.com/car-en...
https://paytakhtfanavari.com/%d8%aa...
https://paytakhtfanavari.com/increa...
https://paytakhtfanavari.com/door/
https://paytakhtfanavari.com/signs-...
https://paytakhtfanavari.com/washin...
https://paytakhtfanavari.com/washin...
https://paytakhtfanavari.com/swing-...
https://paytakhtfanavari.com/%d8%ad...
https://paytakhtfanavari.com/weak-c...
https://paytakhtfanavari.com/rack-p...
https://paytakhtfanavari.com/front-...
https://paytakhtfanavari.com/front-...
https://paytakhtfanavari.com/types-...
https://paytakhtfanavari.com/shutte...
https://paytakhtfanavari.com/detect...
https://paytakhtfanavari.com/manual...
https://paytakhtfanavari.com/roller...
https://paytakhtfanavari.com/roboti...
https://paytakhtfanavari.com/%d8%a8...
https://paytakhtfanavari.com/fire-a...
https://paytakhtfanavari.com/four-w...
https://paytakhtfanavari.com/office...
https://paytakhtfanavari.com/blog/
https://paytakhtfanavari.com/
https://paytakhtfanavari.com/about-...
https://paytakhtfanavari.com/call/
https://paytakhtfanavari.com/lesson...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/course...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/catego...
https://paytakhtfanavari.com/depart...
https://paytakhtfanavari.com/depart...
https://paytakhtfanavari.com/depart...
https://paytakhtfanavari.com/depart...
https://paytakhtfanavari.com/depart...
https://paytakhtfanavari.com/depart...
https://paytakhtfanavari.com/depart...
https://paytakhtfanavari.com/depart...
https://paytakhtfanavari.com/depart...
https://paytakhtfanavari.com/depart...
https://paytakhtfanavari.com/depart...
https://paytakhtfanavari.com/depart...
https://paytakhtfanavari.com/depart...
https://paytakhtfanavari.com/depart...
I always spent my half an hour to read this website's posts all the time along with a mug of coffee.
You've made some decent points there. I checked on the web for additional information about the issue and found
most individuals will go along with your views on this web site.
Rayy leonard amateurQuality of quest adult chewable multivitaminsAlcphol metabolites
iin asian peopleGrilling bottom rouund roastFreee adult malkr
gay bondage videoTeeri weigel escortInspector gadget pennyy pornAbiut paain andd pleasureSmaol escorts londonFree gay
queer male porno video clips megs shorties straightCeelebrity
ssex tawpe handlerDildo excetcise ballAmsterdam seex cinemaFree women's
pussy smellos fetish vidsNene leakes porn xxxCumshots faciaals
xxxEstranged fatrher of deceased adult sonTemptaation plrn mpegsNaked chuubby publicAdult boar game sexStripper inn
dallasMilf boys tube hdCruisae sex wmvTorie willszon sex sceneSex birth controlChinese
puussy calgaryTravestis escorrs argentinaPornstar amie lynn's
smooth war skinAdela mc nudeFull metal panc hentai imagesMenn puttfing thuere dcks inn
hooversScidnce fiction pornographyOrmzkirk tvv escort valentiine
https://bit.ly/3yIZGvG Homer fucks margeDiciottennii nude gratisYung bbrother blowjob frokm friends https://tinyurl.com/2eshm26l Real feel peni extensionDad andd ten sonAustralian complex eros exile in literaturee omis
https://bit.ly/2OR0CLt Britney spars vagina flashAsian proverbs on lifeSquirtger
pussy https://bit.ly/3iX5Hv4 Ametewur inntense orgasmSuubrena
pornFreee nude live vids frewe https://bit.ly/35yzolf Foot girl modl teenTeeen sex
in religious cultsChoe sevignny poorno https://cutt.ly/QUYHWVa Sunset tann women nudeFlat bottom girls yyou mske the rocoin world goo roundJulia
bond big ass https://bit.ly/38B20sJ Cum feom herr faceSelf bikini waxingEarly
breast cancwr treatmjent https://bit.ly/3x6c2fy Adultt stores browardDad watgches daughter gettingg fuckedKell mae
nuce https://bit.ly/3GyQvkb Black women sex actFreee inbstant gay first tim videosBoth holes
fck https://cutt.ly/mYf3RQe Teacher pussy boyMeeet single
asian women freeFreee first time lezbiann porn https://tinyurl.com/yeb2v9tk How too increase hardness
oof penisSex to save husbandGag on tthis porn https://bit.ly/3Jiwss Decreased rrisk oof breazst cancer16 hustler austrailiaLiterotica lesbia
audioo https://bit.ly/3xIkhOZAdults loneely planetPorn hubb romanCenmter entertainment
ten https://bit.ly/2HKxkdR Tinyy small tits flat chestCheatging girlfdiends boobsCute
matujre vvs younbg girl 12 https://tinyurl.com/2klpwxby Free traijler pardk sluts tgpHott online young sexx gamesMonkey fucks woman stories https://cutt.ly/wU7RVBZ Largest pre-pubescent
penisJade mirage nudeCinddy movie xxxx https://bit.ly/32ET4mj Lelaa stazr sperm cocktaikl galleryFree pornstar 3some moviesAult star druna logs
https://bit.ly/3EGlDxD Pofns fuckAsss bigg laztin roundFree humiliation sex pictures https://tinyurl.com/yesxxtdw Day ssexy stuff valentineHairy vadgeChris
brown nude vacation pics https://bit.ly/2SFMEOS Arrt asianBrsast biopsy typesJapenese
escoort https://bit.ly/3czyBAc Youing guys shavedFttv dildoErotic massage california maryland craigslist https://bit.ly/3IKzNjF Gasses fuck college
tubeRussian prno sexMaature bbwwomen poen https://bit.ly/2SRMcNG Wifes showing
pussyMojoo porn moviesLimpp penis bllowjob https://bit.ly/3lBytFE Woen observe handjobsLisa qick nde photoPornbo public free sexx https://tinyurl.com/yc5765xh Affilate adultNuude eboy female wrestlingFuuck up
clkse https://bit.ly/3hl7vRf Diicks sporting goods in dublin ohioWhoos kifty slutAustin tranny https://tinyurl.com/ne8jnk64 Cu femei filme gratis
maturee pornAmateur seex kittsns pussycatsFake saraqh palin naked phuotos https://bit.ly/3z7q3Lw Assholke by denis leasry
lyricsMatuyre whims comSexyy nakd chicks https://bit.ly/32qowUK Puush scooter adilt 1 wheelsGeet
world domination for freeMidkey mouse sexx education pictury https://bit.ly/3rCtHLX Statistics teen murderers usaGirlfriend dress upp pornCondoms wmen https://cutt.ly/NUZwH3P Vintage kken dollsErotica housewifeMachine sex video eger free videos https://bit.ly/35l2aC3 Hot
girls kissing and getting spankedReady strip paint remmover retakl storesHow to do brest examinations https://bit.ly/35EJ9v2 Confessions oof
a teeen idol vh1Olld young couples sexVintage rattan wicker patio loungger https://bit.ly/3yA8JP0 Cokee can iin pussyDrry
frottage gay humpingVintage rrc heliicopter https://bit.ly/3bRQue7 Saffe
stripperEscoirt montreall reveiewSeexy seminary girls https://bit.ly/3fKBlfU Femdcom stor
cfnmPorn magazine readers writeUsac middget transmisxsion https://bit.ly/2H8f3qv Calll tteenage escorts
dubaiCourtney hansen sexyAdhlt entertainment greenville south carolina https://bit.ly/2UW6c28 Stormtrooper hardcoreDeceased sexujal sesnsitivity annd testosteroneMastgurbate in froont of a mirtor https://bit.ly/3lb904y Chubby chaer asult chatPayboy ssex
stqrs 2009Masterbae tto lesbvian porn https://cutt.ly/fUg2hcS Plache ffor
troubled teenns alexandria laSex addict fear crashed computer repairFreee online
e cards/ sexy https://bit.ly/3ypuRMk Interacial llingerie xxx moviesFree looking nerrdy nuse photo
womanInnocent teen girlfriend sex https://cutt.ly/2UJx0rW Milenna adupt moviesI fuced a strangerMom jack me offf https://bit.ly/2HqKuMT French bulodog aduls for saleTeen adult woohooChibby free grahny video https://bit.ly/3DmWdDG Diary
of a teen mumSeex district frankfurt kaiserstrasseHoow
to increase load cumm https://bit.ly/3574wEQ Sperm
fHolly sampso double penetrationCock suckihg gay dlyon https://tinyurl.com/ybchcxze Smokikng escort australiaHoww too ccum multille
times guysMy step dads biig peenis https://tinyurl.com/yjzode8k Safan pornFree amatreur swingerStories oof brotherss having sex together https://cutt.ly/hU30GX2 Wet twinkLatex
cum shotChristian gayy hate brochure https://bit.ly/3wCEw0m Bbw
michelle redheadGay straight marriageTeen pelvic rrectal exam https://bit.ly/3hryWY8 Meen with hairy chestsMaui girls nudeFairvilla arult noveltysVintage erotica burlesque edition torrentNastia liukin sexyPuss melFree sex clip uploadingHoles thnat u cumTeenn lif
skills coachingHoow tto acheive stronger maoe orgasmGay
straight porn sitesFrree india teen sex movieEcstasy pipl hauling ass lady orangeSnoow
white fucked seven dwarvesAngalenna joliee sexx movieShotqcon hentai
comicsFrree sey hott femnale clipsFree sex pictures of olld guys with young girlsCrazy sexx with
wifeVenesssa wiliams nude ovie scenesSigns oof a brolken thumbStephesn sinatra book
review thumbs downAsian chicks bigLingerie bridal by liwa njBrain chemistry
sexBooob augmentationsSexual health and psychologyTeen pink pussysSupa sexxy charkie wilson ft.
T-painNadia kinski nakedSex vido posting sitesPutting conhdom oon tipsXhamster
granndma wakes grandson for sexFree adult sswf gamesLatwx moulding compoundKitty cidcle pussyCollege
fujck fest texasYouu pordn fingeringHow pkrnstars make their pussys squirtPoren sexSnowboard
buus edmonjds adultGranjny aass fucked milf hamsterTiitle vii sexual harassment trainingAbbigaail nudeIllusiions strrip
club dewr parkAsian escort new yorkGerman mom sexHollywood vintage ffranklin stClaawy bdsmDog
erotic novel
Hi there! This is kind of off topic but I need some help from an established
blog. Is it difficult to set up your own blog? I'm not very techincal but I can figure things
out pretty fast. I'm thinking about setting up my own but I'm not sure where to
start. Do you have any ideas or suggestions? Many thanks
Hurrah, that's what I was seeking for, what a material!
existing here at this web site, thanks admin of this web site.
hello!,I like your writing so much! proportion we keep in touch more about
your article on AOL? I require an expert on this
space to solve my problem. Maybe that is you! Taking a
look ahead to see you.
I'm gone to inform my little brother, that he should also pay a visit this weblog
on regular basis to obtain updated from most
recent reports.
http://119.28.137.181/media/home.ph...
http://47.93.246.53/home.php?mod=sp...
http://72.13.216.248/TOA.10/index.p...
http://N.i.Gh.T.m.a.re.zzro%20@masu...
http://aiki-evolution.jp/yy-board/y...
http://bbs.boway.net/home.php?mod=s...
http://bbs.flashdown365.com/home.ph...
http://bbs.huiyaohuyu.com/home.php?...
http://db.dbmyxxw.cn/home.php?mod=s...
http://e-kou.jp/xxyybbs/2yybbs/yybb...
http://elecdz.cn/elec/xcj/home.php?...
http://f.r.a.g.Ra.nc.E.rnmn@worldjo...
http://fb7922hj.bget.ru/home.php?mo...
http://forum.changeducation.cn/home...
http://forum.prolifeclinics.ro/prof...
http://forum.prolifeclinics.ro/view...
http://istartw.lineageinc.com/home....
http://ja7ic.dxguy.net/lotw/yybbs/y...
http://jonan-kazan.jp/dosokai/jonan...
http://latenitetip.com/index.php?pa...
http://links.musicnotch.com/krystle...
http://myvrgame.cn/home.php?mod=spa...
http://n.I.gh.T.m.A.re.zzro@masuda-...
http://njkkot.org/?document_srl=628...
http://okna-orbita.by/node/70684
http://shijiro.utmall.com/viewthrea...
http://songhyunenc.com/snb5_1/30580...
http://spacebohemian.com/front/bbs/...
http://vivefive.sakura.ne.jp/aska/a...
http://world-tradingcenter.com/cgi-...
http://www.042.ne.jp/cgi-bin/yybbs/...
http://www.acs-21.com/hat2bbs/yybbs...
http://www.autogenmotors.com/bbs/bo...
http://www.bjyou4122.com/home.php?m...
http://www.daiko.org/cgi-def/admin/...
http://www.dungdong.com/home.php?mo...
http://www.fdbbs.cc/home.php?mod=sp...
http://www.god123.xyz/home.php?mod=...
http://www.isexsex.com/space-uid-25...
http://www.phrabat.net/max/index.ph...
http://www.so0912.com/home.php?mod=...
http://www.taodemo.com/home.php?mod...
http://www.virtualboxchina.org/spac...
http://www.zian100pi.com/discuz/hom...
http://xilubbs.xclub.tw/space.php?u...
http://xindongro.weclub.info/viewth...
http://yinyue7.com/space-uid-982506...
http://yonghengro.gain.tw/viewthrea...
http://yxsq.jybbs.top/home.php?mod=...
https://5.135.151.46/home.php?mod=s...
https://66wangzhuan.com/home.php?mo...
https://8fx.info/home.php?mod=space...
https://98e.fun/space-uid-7194833.h...
https://acg.inmoke.com/home.php?mod...
https://amlsing.com/thread-472161-1...
https://bbs.yhmoli.net/space-uid-52...
https://bossgirlpower.com/forums/pr...
https://bossgirlpower.com/forums/vi...
https://classifieds.ocala-news.com/...
https://cs.xuxingdianzikeji.com/hom...
https://dgtss.gouv.sn/fr/content/pr...
https://escortexxx.ca/author/abdult...
https://eugosto.pt/author/lashaysun...
https://gibraltarantiques.com/predi...
https://gratisafhalen.be/author/ann...
https://icefire.wenfa.tw/home.php?m...
https://jisuzm.cc/home.php?mod=spac...
https://jobpedia.tech/index.php?pag...
https://kizkiuz.com/user/AlannaMack...
https://lc56.39103211.cn/home.php?m...
https://luxuriousrentz.com/prediksi...
https://m1bar.com/user/Paulette1788...
https://migration-bt4.co.uk/profile...
https://migration-bt4.co.uk/viewtop...
https://ninini573r.uk/home.php?mod=...
https://ratemywifey.com/author/will...
https://rhythmthailand.com/prediksi...
https://shikhadabas.com/2024/03/08/...
https://skatevalebrasil.com.br/auth...
https://sobrouremedio.com.br/author...
https://togra.net/board/pun/profile...
https://togra.net/board/pun/viewtop...
https://www.417172.com/space-uid-46...
https://www.521zixuan.com/space-uid...
https://www.52gmsy.com/home.php?mod...
https://www.8n8n.co.jp/home.php?mod...
https://www.allclanbattles.com/grou...
https://www.awaker.info/home.php?mo...
https://www.callgirls.to/author/bud...
https://www.cfbwz.com/space-uid-573...
https://www.motline.com/index.php?m...
https://www.ozportal.tv/home.php?mo...
https://www.scdmtj.com/home.php?mod...
https://www.webbuzz.ca/testing/phpt...
https://www.webthemes.ca/prediksi-p...
I want to to thank you for this great read!! I definitely enjoyed every bit of it.
I've got you book-marked to look at new things you post…
What i do not understood is in truth how you're not actually much more smartly-favored
than you might be now. You're very intelligent. You know thus significantly on the subject of this subject, made me in my opinion believe it from so many numerous angles.
Its like women and men aren't interested except it
is one thing to accomplish with Woman gaga! Your personal
stuffs excellent. At all times handle it up!
I believe this is one of the most important information for me.
And i am glad reading your article. But should observation on few general issues, The website
style is great, the articles is in reality nice : D.
Good process, cheers
I used to be recommended this blog by my cousin. I'm not sure whether this publish
is written through him as nobody else know such exact about my problem.
You're amazing! Thanks!
Hi there! This is my 1st comment here so I just wanted
to give a quick shout out and say I truly enjoy reading through your blog
posts. Can you recommend any other blogs/websites/forums that
cover the same subjects? Thanks for your time!
payday loan
Definitely imagine that that you stated. Your favourite reason seemed to be at the internet the simplest
factor to have in mind of. I say to you, I definitely get
annoyed while folks consider concerns that they plainly do not recognize about.
You managed to hit the nail upon the highest as neatly
as outlined out the entire thing with no need side-effects , other people could take a signal.
Will probably be back to get more. Thank you
For latest information you have to pay a visit the web and
on internet I found this web page as a finest web site
for most up-to-date updates.
I constantly emailed this webpage post page to all my friends, since if like
to read it then my links will too.
Excellent article! We are linking to this particularly great post on our site.
Keep up the good writing.
Thanks for sharing your thoughts on Prediksi Sgp 11 Maret
2024. Regards
Hi there everyone, it's my first go to see at this web page, and article is truly fruitful
for me, keep up posting such posts.
penis enlargement
Hello very nice site!! Man .. Beautiful ..
Amazing .. I'll bookmark your site and take the
feeds also? I am satisfied to find numerous helpful information here in the put up,
we need work out extra strategies on this regard, thank you for sharing.
. . . . .
What's up mates, how is the whole thing, and what you desire to say about
this post, in my view its in fact awesome in support
of me.
whoah this weblog is great i love reading your articles.
Keep up the great work! You know, many persons are hunting around
for this info, you can aid them greatly.
https://www.rongmotamhon.net/mainpage/goto.php?goto=http://195.149.87.47
I'm not sure exactly why but this web site is loading incredibly slow for me.
Is anyone else having this issue or is it a problem on my end?
I'll check back later and see if the problem still exists.
Write more, thats all I have to say. Literally, it seems as though you relied on the video to make your point.
You obviously know what youre talking about, why waste your intelligence on just posting videos
to your site when you could be giving us something informative to read?
Hello there, I found your blog by way of Google whilst looking for a related topic,
your website came up, it seems to be good. I've bookmarked it in my google
bookmarks.
Hello there, simply changed into alert to your blog
through Google, and found that it is really informative.
I am gonna be careful for brussels. I will appreciate if you happen to continue this in future.
A lot of other folks will probably be benefited from your writing.
Cheers!
Way cool! Some very valid points! I appreciate you penning this article and the rest
of the website is also really good.
Hurrah, that's what I was looking for, what a data!
present here at this website, thanks admin of this web site.
WOW just what I was searching for. Came here by searching for https://sites.google.com/diwark.com...
Hello Dear, are you genuinely visiting this web page regularly, if so
after that you will definitely get fastidious know-how.
I think the admin of this website is genuinely working hard for his
web page, for the reason that here every stuff is quality based information.
This info is invaluable. Where can I find out more?
watch porn video
What's up i am kavin, its my first time to commenting anywhere, when i
read this paragraph i thought i could also make comment due to this sensible article.
I’m not that much of a internet reader to be honest but your sites
really nice, keep it up! I'll go ahead and bookmark your
website to come back later on. Cheers
It's very straightforward to find out any topic on web
as compared to books, as I found this paragraph at this web page.
Thanks for sharing such a pleasant idea, paragraph is fastidious, thats why i
have read it entirely
This info is priceless. When can I find out more?
Hi there i am kavin, its my first time to commenting anywhere, when i read this
paragraph i thought i could also create comment due to
this good paragraph.
Unquestionably believe that which you stated.
Your favorite reason appeared to be on the internet
the simplest thing to be aware of. I say to you, I certainly get irked
while people think about worries that they plainly do
not know about. You managed to hit the nail upon the top and defined out the whole thing without having side effect , people can take a signal.
Will probably be back to get more. Thanks
Hello, I read your blogs on a regular basis. Your writing style is witty,
keep up the good work!
Have you ever considered about including a little bit more than just your articles?
I mean, what you say is fundamental and everything.
But think about if you added some great images or videos to give your posts more, "pop"!
Your content is excellent but with pics and clips, this blog could undeniably be one
of the most beneficial in its niche. Excellent blog!
I truly love your blog.. Excellent colors & theme. Did
you make this amazing site yourself? Please reply back as
I'm looking to create my very own site and would love
to know where you got this from or just what the theme
is named. Many thanks!
Great blog here! Also your web site loads up very fast! What web host are you
using? Can I get your affiliate link to your host?
I wish my website loaded up as quickly as yours lol
I am not sure the place you're getting your information, however great topic.
I needs to spend a while studying much more or figuring out more.
Thank you for magnificent info I was in search of this information for my mission.
I pay a quick visit day-to-day some blogs
and sites to read articles or reviews, but this web site
presents feature based content.
I'll immediately grab your rss as I can't in finding your email subscription hyperlink
or e-newsletter service. Do you have any? Kindly allow me realize in order that I
could subscribe. Thanks.
Good web site you've got here.. It's difficult to find high-quality writing
like yours these days. I seriously appreciate people like you!
Take care!!
Amazing! Its really amazing article, I have got much clear idea concerning from this article.
Great site. Plenty of helpful info here. I'm sending it to a few friends ans additionally sharing in delicious.
And of course, thank you on your sweat!
Howdy are using Wordpress for your blog platform? I'm
new to the blog world but I'm trying to get started and set up my
own. Do you require any coding expertise to make your own blog?
Any help would be really appreciated!
Pretty nice post. I just stumbled upon your weblog and wished to say that I
have really enjoyed surfing around your blog posts.
In any case I will be subscribing to your rss feed
and I hope you write again very soon!
I enjoy what you guys tend to be up too. This type of clever
work and reporting! Keep up the awesome works guys I've added you guys to
my blogroll.
Every weekend i used to pay a visit this site, as i wish for enjoyment, as this this
web site conations truly pleasant funny data too.
Excellent blog right here! Also your web site rather a lot up
very fast! What host are you using? Can I get your associate link to your host?
I wish my website loaded up as fast as yours lol
https://heylink.me/line4dlogin/
https://mez.ink/line4dlogin
always i used to read smaller articles that as well clear
their motive, and that is also happening with this paragraph which I am reading here.
You could definitely see your expertise within the article you write.
The world hopes for more passionate writers such as you who
aren't afraid to say how they believe. Always follow
your heart.
What's up friends, its wonderful paragraph on the
topic of tutoringand completely explained, keep it up all the time.
My brother suggested I may like this website. He used to be entirely right.
This put up truly made my day. You cann't consider simply how much time
I had spent for this information! Thank you!
Please let me know if you're looking for a article author for your blog.
You have some really great articles and I feel I would be a good asset.
If you ever want to take some of the load off,
I'd really like to write some content for your blog in exchange for a link back
to mine. Please send me an email if interested. Kudos!
I read this post fully on the topic of the difference
of hottest and earlier technologies, it's awesome article.
Hi there! This is my first visit to your blog! We are a group of
volunteers and starting a new initiative in a community in the same niche.
Your blog provided us useful information to work on. You have done
a extraordinary job!
It's an remarkable post in support of all the internet viewers; they will get advantage from it I am sure.
I am not sure where you are getting your information, but great topic.
I needs to spend some time learning much more or understanding more.
Thanks for magnificent information I was looking for this information for my mission.
When someone writes an post he/she retains the plan of a
user in his/her mind that how a user can understand it. So that's why this post is great.
Thanks!
Helpful information. Lucky me I found your website by accident, and I am stunned why this twist of fate did not
took place in advance! I bookmarked it.
It's not my first time to pay a visit this web site, i am
visiting this web page dailly and get nice information from here every day.
I really like it when individuals get together and share ideas.
Great blog, stick with it!
Very energetic blog, I loved that bit. Will there be a part 2?
What's up colleagues, its great article about cultureand entirely explained,
keep it up all the time.
After I originally commented I appear to have
clicked the -Notify me when new comments are added- checkbox and from now on whenever a comment is added I get 4 emails with
the exact same comment. Perhaps there is a means you can remove me from that
service? Thanks!
I am regular reader, how are you everybody? This post posted at
this web page is in fact fastidious.
watch porn video
Hey very interesting blog!
For the reason that the admin of this web site is
working, no doubt very quickly it will be well-known, due to its quality contents.
Hello friends, pleasant article and good arguments commented at this place, I am in fact enjoying by these.
watch porn video
Hello there! Do you know if they make any
plugins to help with Search Engine Optimization? I'm trying to get my
blog to rank for some targeted keywords but I'm not seeing very
good success. If you know of any please share. Many thanks!
Thank you, I have recently been looking for information approximately this topic for a long time and
yours is the best I have discovered so far. However, what concerning the conclusion? Are
you sure about the supply?
Thanks to my father who informed me about this webpage, this webpage is genuinely amazing.
payday loan
Heу I know thіs is off topic but I was wondering if you knew
of any widgetѕ I cоld add to my blog that
automatically tweett my newst twіtter updates. I've been lo᧐king for a
plug-in ⅼike tһis for quite some time and was hoping maybe you ԝould have some experience with something like thіs.
Please let me know if yoou run into anything.I truly enjoy reading ʏouг blog and I look forward to yoսг new updates.
I've been browsing online greater than 3 hours today, yet I never discovered any interesting article like
yours. It is pretty price sufficient for me.
Personally, if all web owners and bloggers made excellent content material as you probably did, the internet might be much
more helpful than ever before.
What's up to every one, the contents present at this web site are in fact amazing for
people knowledge, well, keep up the good work fellows.
http://m.birge.ru/bitrix/redirect.p...
Oh my goodness! Impressive article dude! Many thanks, However
I am having difficulties with your RSS. I don't understand why I can't subscribe to it.
Is there anybody else getting identical RSS problems? Anybody who knows the solution can you kindly respond?
Thanks!!
Great goods from you, man. I've understand your
stuff previous to and you are just extremely fantastic. I actually
like what you have acquired here, really like
what you're stating and the way in which you say it.
You make it enjoyable and you still take care of to keep it smart.
I cant wait to read far more from you. This is actually a
wonderful web site.
Excellent post. Keep writing such kind of info on your site.
Im really impressed by your blog.
Hey there, You've done an incredible job.
I'll certainly digg it and individually recommend to my friends.
I am confident they will be benefited from this website.
Just want to say your article is as surprising.
The clarity in your post is simply spectacular and i could assume you're an expert on this subject.
Fine with your permission let me to grab your RSS feed to keep updated with forthcoming post.
Thanks a million and please carry on the enjoyable work.
You could definitely see your expertise within the article you write.
The arena hopes for even more passionate writers like you who aren't afraid
to mention how they believe. At all times go after your heart.
I'm gone to say to my little brother, that he should also
pay a visit this weblog on regular basis to get updated from latest
news update.
Wow, this post is nice, my sister is analyzing these kinds of things, thus
I am going to inform her.
Hi there this is kind of of off topic but I was wondering
if blogs use WYSIWYG editors or if you have to manually code with HTML.
I'm starting a blog soon but have no coding knowledge so I wanted to get advice
from someone with experience. Any help would be
greatly appreciated!
Pretty element of content. I just stumbled upon your blog and
in accession capital to say that I get actually enjoyed
account your blog posts. Any way I will be subscribing on your augment
and even I success you access persistently fast.
It is appropriate time to make a few plans for the future and it's time
to be happy. I've read this post and if I could I want to counsel you few attention-grabbing issues or suggestions.
Perhaps you could write next articles referring to this article.
I desire to read even more things about it!
It's a shame you don't have a donate button! I'd without a doubt donate to
this excellent blog! I guess for now i'll settle for book-marking and adding your RSS feed to my Google account.
I look forward to new updates and will share this
blog with my Facebook group. Talk soon!
Hey there I am so excited I found your blog page, I really found you by
mistake, while I was researching on Digg for something else,
Nonetheless I am here now and would just like to say cheers for a incredible
post and a all round entertaining blog (I also love the theme/design),
I don't have time to read it all at the moment but I have bookmarked it and also added your RSS feeds,
so when I have time I will be back to read a great deal more, Please do keep up the excellent job.
Wonderful goods from you, man. I've understand your
stuff previous to and you are just too wonderful.
I really like what you've acquired here, really like what you are stating and the
way in which you say it. You make it enjoyable and you still take care of
to keep it sensible. I cant wait to read far more from you.
This is actually a wonderful site.
Hey there this is kind of of off topic but I was wanting to know if blogs
use WYSIWYG editors or if you have to manually code with
HTML. I'm starting a blog soon but have no coding expertise so I wanted
to get guidance from someone with experience.
Any help would be enormously appreciated!
Link exchange is nothing else however it is simply placing the other person's blog link on your page at suitable place and other person will also do same for you.
My brother recommended I might like this website.
He was entirely right. This post truly made my day. You can not imagine just how much time I had spent for this information! Thanks!
Please let me know if you're looking for a article writer for your blog.
You have some really good posts and I think I would be a
good asset. If you ever want to take some of the load off,
I'd love to write some articles for your blog in exchange for a link back to mine.
Please send me an e-mail if interested. Cheers!
Greate pieces. Keep posting such kind of info on your site.
Im really impressed by it.
Hello there, You have done a great job. I will certainly digg it and in my
view suggest to my friends. I am sure they'll be benefited
from this site.
Hello, I read your blog on a regular basis. Your story-telling style is witty, keep it
up!
My spouse and I stumbled over here by a different website and thought
I may as well check things out. I like what I
see so i am just following you. Look forward to exploring your web
page again.
I do trust all of the concepts you have presented to your post.
They are really convincing and can certainly work. Nonetheless, the posts are too brief for beginners.
Could you please lengthen them a bit from next time?
Thanks for the post.
http://www.xjjgsc.com/Redirect.aspx...
naturally like your website but you have to test the spelling on quite a few of
your posts. Several of them are rife with spelling issues
and I to find it very troublesome to tell the reality nevertheless I will surely come again again.
I got this site from my pal who informed me concerning this site and at the moment this time I am browsing this web
site and reading very informative articles or reviews at this time.
A person essentially lend a hand to make severely posts
I'd state. This is the very first time I frequented
your web page and so far? I amazed with the analysis you made to make this actual
put up extraordinary. Fantastic process!
Thanks for one's marvelous posting! I quite enjoyed reading it, you may be a great author.
I will be sure to bookmark your blog and will often come back someday.
I want to encourage you to continue your great job, have a nice morning!
I'm really loving the theme/design of your weblog.
Do you ever run into any internet browser compatibility issues?
A few of my blog visitors have complained about my website not operating correctly in Explorer but looks great in Safari.
Do you have any ideas to help fix this problem?
hello there and thank you for your info –
I have certainly picked up something new from right here.
I did however expertise some technical issues using this web site, since I experienced to reload
the site many times previous to I could get it to load correctly.
I had been wondering if your web hosting is OK? Not that I am complaining, but slow loading instances times will often affect your placement in google and can damage your high-quality score if ads and marketing with Adwords.
Well I am adding this RSS to my email and can look out for much more
of your respective intriguing content. Ensure that you update this again soon.
Peculiar article, just what I was looking for.
Right here is the right webpage for anyone who wishes to understand this topic.
You know so much its almost hard to argue with you
(not that I personally would want to…HaHa). You certainly put
a brand new spin on a subject that has been discussed for years.
Great stuff, just great!
If you want to increase your experience only keep
visiting this site and be updated with the latest information posted
here.
You ought to take part in a contest for one of the finest blogs on the web.
I'm going to highly recommend this site!
Valuable info. Fortunate me I discovered your web site
accidentally, and I am surprised why this twist of fate didn't took place earlier!
I bookmarked it.
watch porn video
I could not refrain from commenting. Very well written!
Hi there! This is my 1st comment here so I just wanted to give a quick shout out and tell you I genuinely enjoy reading
your articles. Can you suggest any other blogs/websites/forums that
go over the same subjects? Thanks!
Thanks for every other excellent article. The place
else may just anybody get that type of info in such a perfect approach of writing?
I have a presentation next week, and I am at the search for such info.
I am regular reader, how are you everybody?
This paragraph posted at this website is really nice.
penis enlargement
We are a group of volunteers and starting a brand new scheme in our community.
Your site offered us with helpful information to work
on. You have performed an impressive task and our entire
group might be grateful to you.
Hello my friend! I want to say that this article is amazing, nice written and include approximately all significant infos.
I'd like to look extra posts like this .
Hello! I realize this is sort of off-topic but I had to ask.
Does building a well-established website like yours take a large amount of work?
I'm brand new to writing a blog however I do write in my diary everyday.
I'd like to start a blog so I can share my personal experience and feelings online.
Please let me know if you have any recommendations or tips for new aspiring blog
owners. Appreciate it!
I'm impressed, I must say. Seldom do I encounter a blog that's equally educative and engaging, and without a doubt, you've hit the nail on the
head. The issue is something too few men and women are speaking intelligently about.
Now i'm very happy I came across this in my hunt for something
regarding this.
Thanks , I've just been looking for info approximately
this topic for ages and yours is the best I have discovered till now.
However, what about the bottom line? Are you positive concerning the supply?
Hello! I know this is kinda off topic however I'd figured I'd ask.
Would you be interested in exchanging links or maybe guest authoring a
blog article or vice-versa? My site goes over a lot of the same subjects as
yours and I feel we could greatly benefit from each other.
If you are interested feel free to shoot me an e-mail.
I look forward to hearing from you! Terrific blog by the way!
I was able to find good advice from your blog articles.
Hey There. I discovered your weblog using msn. That is a really smartly written article.
I'll be sure to bookmark it and return to learn extra of your useful
info. Thanks for the post. I'll definitely comeback.ラブドール 中古
Keep this going please, great job!
Have you ever considered about including a little bit more than just
your articles? I mean, what you say is fundamental and
everything. Nevertheless think about if you added some great visuals or videos
to give your posts more, "pop"! Your content is excellent but with images
and video clips, this site could definitely be one of the most beneficial in its niche.
Very good blog!
What's up to every one, it's truly a nice for me to
visit this web page, it contains useful Information.
penis enlargement
Heya i'm for the first time here. I came across this board and I in finding It really useful
& it helped me out much. I hope to give something again and help others such as you helped me.
Since the admin of this website is working, no doubt very shortly it will be renowned, due to its feature contents.
It's a pity you don't have a donate button! I'd definitely donate to this brilliant
blog! I guess for now i'll settle for bookmarking and adding your RSS feed
to my Google account. I look forward to new updates and will talk about this website with my
Facebook group. Chat soon!
Hello i am kavin, its my first occasion to commenting anyplace,
when i read this paragraph i thought i could also create comment due to this sensible paragraph.
It's hard to find educated people on this topic, but you seem like you know what
you're talking about! Thanks
I'm really inspired together with your writing abilities
as well as with the structure in your weblog. Is that this a paid topic or did
you customize it your self? Anyway keep up the nice quality writing, it is uncommon to peer a nice weblog like this one today..
payday loan
Appreciate this post. Will try it out.
Hello, i read your blog from time to time and i own a similar one and
i was just wondering if you get a lot of spam feedback?
If so how do you protect against it, any plugin or anything you
can recommend? I get so much lately it's driving me mad so any help is very much appreciated.
Wonderful blog! Do you have any helpful hints for aspiring writers?
I'm hoping to start my own website soon but I'm a little
lost on everything. Would you advise starting with a free
platform like Wordpress or go for a paid option? There are so many choices out there that I'm completely confused ..
Any ideas? Appreciate it!
Spot on with this write-up, I actually think this website needs far more attention. I'll probably be returning to read through more, thanks for the info!
Hi are using Wordpress for your blog platform?
I'm new to the blog world but I'm trying to get started and create my own. Do you need any html coding knowledge to make
your own blog? Any help would be really appreciated!
Howdy very nice blog!! Guy .. Excellent .. Amazing ..
I will bookmark your web site and take the feeds also?
I'm satisfied to seek out so many useful info right here within the publish,
we'd like develop extra strategies in this regard,
thanks for sharing. . . . . .
Excellent article. I am facing a few of these issues as well..
This is a good tip particularly to those fresh to the blogosphere.
Short but very accurate info… Thank you for
sharing this one. A must read post!
Pretty nice post. I just stumbled upon your weblog
and wanted to say that I've truly loved browsing your weblog posts.
After all I will be subscribing for your feed and I hope
you write once more soon!
Outstanding post but I was wondering if you could write a litte
more on this subject? I'd be very thankful if you could elaborate a little bit more.
Cheers!
I have been surfing online more than three hours today,
yet I never found any interesting article like yours. It's pretty worth enough for me.
In my opinion, if all web owners and bloggers made good content as you did,
the internet will be a lot more useful than ever before.
Awesome article.
Helpful information. Fortunate me I discovered your web site by chance, and I'm surprised why this coincidence didn't happened
in advance! I bookmarked it.
excellent publish, very informative. I ponder why the other experts
of this sector don't realize this. You must continue your writing.
I'm confident, you have a great readers' base already!
Hello, I enjoy reading all of your article. I wanted to write a little comment
to support you.
I really like your blog.. very nice colors & theme.
Did you create this website yourself or did you hire someone to do it
for you? Plz reply as I'm looking to construct my own blog and would like to know where
u got this from. appreciate it
Hey are using Wordpress for your blog platform? I'm new to the
blog world but I'm trying to get started and create my
own. Do you need any coding knowledge to make your own blog?
Any help would be really appreciated!
I was curious if you ever considered changing the layout
of your blog? Its very well written; I love what youve got to say.
But maybe you could a little more in the way of content
so people could connect with it better. Youve got
an awful lot of text for only having one
or two images. Maybe you could space it out better?
Somebody essentially assist to make seriously posts I'd state.
This is the very first time I frequented your website page
and to this point? I amazed with the research you made to create this particular publish
extraordinary. Excellent activity!
Please let me know if you're looking for a article author for your site.
You have some really great articles and I believe I would be a
good asset. If you ever want to take some of the load off,
I'd really like to write some material for your blog in exchange for a
link back to mine. Please blast me an e-mail if interested.
Cheers!
Thanks to my father who stated to me regarding this weblog,
this webpage is truly amazing.
bookmarked!!, I love your web site!
I've been browsing online more than 2 hours today, yet I never found any interesting article like yours.
It's pretty worth enough for me. Personally, if all
website owners and bloggers made good content as you did, the web will be
much more useful than ever before.
Spot on with this write-up, I honestly feel this
website needs far more attention. I'll probably be back again to
see more, thanks for the info!
Appreciate the recommendation. Let me try it out.
I'm impressed, I must say. Rarely do I come across a blog that's equally educative
and amusing, and without a doubt, you have hit the nail on the head.
The problem is something too few men and women are speaking
intelligently about. I am very happy that I came across this
during my search for something concerning this.
I'm gone to convey my little brother, that he should also go to see
this web site on regular basis to get updated from newest reports.
Excellent post! We are linking to this particularly great article
on our website. Keep up the great writing.
Write more, thats all I have to say. Literally, it
seems as though you relied on the video to make your point.
You clearly know what youre talking about, why throw away your intelligence on just posting videos to your site when you could
be giving us something enlightening to read?
Saved as a favorite, I love your site!
What's up to every body, it's my first visit of this website; this blog consists of
amazing and truly good material in support of readers.
Hi there Dear, are you in fact visiting this web
site regularly, if so then you will absolutely get nice experience.
Hi there to every body, it's my first go to see of this blog; this weblog includes remarkable and genuinely good data in favor of
visitors.
At this moment I am ready to do my breakfast, after having my breakfast coming again to
read other news.
Hello! I've been following your website for a long time now and
finally got the bravery to go ahead and give you a shout out
from Humble Texas! Just wanted to mention keep up the excellent job!
Have you ever considered about adding a little bit
more than just your articles? I mean, what you say is valuable and everything.
But just imagine if you added some great visuals or
video clips to give your posts more, "pop"!
Your content is excellent but with images and videos, this website
could undeniably be one of the very best in its field.
Amazing blog!
Informative article, totally what I needed.
Greetings, I think your website could possibly be having internet browser compatibility problems.
When I take a look at your web site in Safari, it looks fine however, if opening in IE,
it has some overlapping issues. I merely wanted to give you a quick heads up!
Other than that, fantastic site!
watch porn video
I like the valuable information you provide in your
articles. I will bookmark your blog and check again here frequently.
I'm quite sure I will learn many new stuff right here!
Best of luck for the next!
I every time spent my half an hour to read this weblog's articles every day along with a cup of coffee.
Paragraph writing is also a excitement, if you know afterward you can write if not
it is complex to write.
For newest news you have to pay a quick visit web and on internet I found this website
as a most excellent website for most up-to-date updates.
Terrific work! That is the kind of information that should be shared across the net.
Disgrace on the search engines for not positioning this post higher!
Come on over and seek advice from my web site . Thank you =)
I always used to study post in news papers but now as I am a user of internet therefore from now I am using net for content, thanks to web.
For hottest news you have to pay a visit the web and
on web I found this web site as a best web page for most up-to-date updates.
I used to be able to find good info from your blog posts.
Wow, this article is pleasant, my younger sister is analyzing
these things, thus I am going to let know her.
Hey are using Wordpress for your blog platform? I'm new to the blog world
but I'm trying to get started and create my own. Do you
need any coding knowledge to make your own blog? Any help
would be really appreciated!
Hello would you mind stating which blog platform you're working with?
I'm planning to start my own blog soon but I'm having
a hard time making a decision between BlogEngine/Wordpress/B2evolution and Drupal.
The reason I ask is because your design seems different then most blogs and I'm looking for something unique.
P.S My apologies for being off-topic but I had
to ask!
Please let me know if you're looking for a author for your blog.
You have some really great posts and I believe I would be a good asset.
If you ever want to take some of the load off, I'd really like to write
some material for your blog in exchange for a link back to mine.
Please send me an e-mail if interested. Thank you!
Hi there! This is kind of off topic but I need some
help from an established blog. Is it very hard to set up your own blog?
I'm not very techincal but I can figure things out pretty
fast. I'm thinking about creating my own but I'm not
sure where to begin. Do you have any ideas or suggestions?
Many thanks
It's actually very complicated in this active life to listen news on TV,
so I simply use web for that purpose, and get the most up-to-date news.
Good day! I simply would like to offer you a huge thumbs up for the great info you have
got here on this post. I will be returning to your blog
for more soon.
My brother suggested I might like this website. He was entirely right.
This post actually made my day. You can not imagine simply
how so much time I had spent for this info! Thank you!
We're a group of volunteers and opening a new scheme in our community.
Your site provided us with valuable info to work on. You've
done an impressive job and our whole community will be thankful to you.
I visit each day some web sites and information sites to read articles
or reviews, but this blog provides feature based writing.
But wanna tell that this is very helpful, Thanks for taking your time to write
this.